Луцкий Илья Юрьевич
16 лет
МБОУ СОШ села Красный Ключ
с. Красный Ключ, Нуримановский район, Республика Башкортостан
Калик Светлана Алексеевна, учитель МБОУ СОШ с. Красный Ключ
Историко-исследовательская работа на тему «Есть ли перспективы в развитии ранцевых летательных аппаратов?»
План
1.Введение.
2.История создания ранцевых летательных аппаратов.
3.Типы ранцевых летательных аппаратов.
4.Устройство и принцип действия ракетного ранца.
5.Ранцевый летательный аппарат XXI века.
6.Заключение.
7.Источники информации.
«Человек полетит, опираясь не
на силу своих мускулов, а на силу разума».
Н. Е.Жуковский
Введение
На протяжении многих веков в умах человечества живет мысль о полете. В известных нам сказках, легендах, преданиях существует множество прообразов персональных летательных аппаратов. Так, например, всем знакомые Икар, Баба-Яга, Алладин бесстрашно бороздят небесные просторы на искусственно созданных крыльях, ступе и волшебном ковре-самолете. А люди в серебристых комбинезонах парящие в небе, о которых так много писали фантасты?
И сегодня этих супергероев можно увидеть, в том числе в современных компьютерных играх.
А ведь еще в 1921 г. А. Ф. Андреев в СССР представил на исходатайствование патента, проект портативного ракетного аппарата, который, по его мнению, человек может надевать на себя в виде ранца. В сосудах этого аппарата находятся сжиженные газы: метан и кислород, которые, сгорая, дают реакцию. При помощи последней человек может совершать прогулки на 20 км со скоростью 200км/ч. Вес всего аппарата с горючим около 50 кг. Вес горючего - 8 кг. Полный вес человек + аппарат, около 100 кг.
Сегодня, благодаря развитию науки, полеты человека – не миф, а реальность. Стремясь приспособиться к условиям современного мира, конструкторы продолжают совершенствовать индивидуальные воздушные средства передвижения. Меня заинтересовал вопрос, каково же будущее у этих летательных аппаратов. Прежде чем дать ответ на поставленный вопрос мне пришлось познакомиться с историей создания ранцевых летательных аппаратов, их устройством, типами, биографиями конструкторов и другими не менее интересными фактами, связанными с использованием ранцев. Собранная и изученная информация позволяет мне сделать предположение, что у ранцевых летательных аппаратов в перспективе есть будущее. И пусть не в XXI веке, то в последующие столетия, этот вид транспорта обязательно найдет широкое применение. А пока, в ближайшем обозримом будущем, с реактивным ранцевым летательным аппаратом смогут летать лишь космонавты, каскадеры-экстремалы и авиаэнтузиасты.
История создания ранцевых летательных аппаратов
Реактивный ранец (или ракетный ранец; англ. jet pack, rocket pack, rocket belt и др.) — персональный летательный аппарат, носимый на спине, позволяющий человеку подниматься в воздух посредством реактивной тяги. Тяга создаётся за счёт выбрасываемой двигателем вертикально вниз реактивной струи.
Интересна история создания ранцевых летательных аппаратов. Над конструкцией этих аппаратов с переменным успехом бьются лучшие умы человечества, начиная со времен Второй мировой войны.
Химмельштурмер ("небесный бунтарь") был результатом экспериментов в последние дни войны. Это устройство состояло из двух маломощных ракет, которые закреплялись на груди и спине пилота, позволяя ему, по крайней мере, в теории, пролетать 55 метров. Подразумевалось, что это устройство поможет инженерным подразделениям перелетать через реки и минные поля. Однако для регулярных сил оно не было предназначено. К сожалению ни одного эскиза Химмельштурмера не сохранилось, но, возможно, он выглядел так.
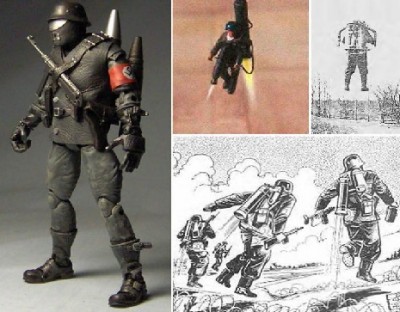
Химмельштурмер
Полёты или скорее прыжки измерялись секундами. Устройство отключалось сразу же, как только закрывалась дроссельная заслонка, поэтому оно было очень простым в эксплуатации и во время испытаний не было никаких травм. Как и многие другие немецкие технологии после 1945 года Химмельштурмер оказался в руках армии США. Компания "Белл Аэросистемс" сделала несколько испытаний с использованием страховочного троса, так как никто не хотел рисковать. Химмельштурмеру суждено было раствориться в истории, однако именно он послужил толчком для дальнейшего исследования реактивных ранцев.
После окончания войны германские ракетные технологии вместе с известным конструктором Вернером фон Брауном попали в США. Один из работавших с Брауном американских инженеров, Томас Мур, создал ЛА, который он именовал «реактивным жилетом» (англ. «Jet Vest»). «Реактивный жилет» работал на перекиси водорода. В 1952 году Мур смог получить грант в 25 тысяч долларов от армии США на создание и испытание собственного устройства. «Реактивный жилет» был сделан и на стендовых испытаниях смог на несколько секунд приподнять пилота над землёй.
Но «жилет» Т.Мура имел очень неудобную систему управления. На груди пилота располагалась коробка, от которой шли тросики к регулятору тяги и двум управляемым соплам портфеля. «Реактивный жилет» Томаса Мура так и не сумел совершить самостоятельный полет, армия ограничила финансирование, и дальнейшие работы были свёрнуты.
В 1958 году Гарри Бурдетт и Александер Бор создали «прыжковый пояс» («Jump Belt»), которому они дали название «Кузнечик». Тяга создавалась сжатым азотом высокого давления. На «поясе» были закреплены два небольших сопла, направленных вертикально вниз. Носитель «пояса» мог открывать клапан, выпуская из баллона сжатый азот через сопла, при этом его подбрасывало вверх на высоту до 7 метров. Наклонившись вперёд, можно было при помощи создаваемой «прыжковым поясом» тяги бежать со скоростью 45—50 км/ч. Позже Бурдетт и Бор опробовали в качестве тяги и перекись водорода. 30 июня 1958 года журнал Life опубликовал фотографии перспективного персонального летательного аппарата фирмы «Тиокол». Журналистов издания пригласили понаблюдать за испытаниями нового реактивного ранца, разработанного в рамках программы Grasshopper. Пилотом-испытателем этого аппарата был Эд Курчевски.

Эд Курчевски и аппарат Grasshopper.
«Прыжковый пояс» был продемонстрирован военным в действии, но финансирования не было, и дальше пробных экспериментов дело снова не пошло.
Тем не менее, американские военные не утратили интереса к переносному летательному аппарату. Управление транспортных исследований армии США всерьез предполагало, что персональные реактивные аппараты могут найти самое разнообразное применение: для разведки, форсирования рек, высадки морских десантов, подъёма на крутые горные склоны, преодоления минных полей, тактического маневрирования и так далее. Концепция получила название «Малое ракетное подъёмное устройство».
В рамках этой концепции Управление в 1959 году заключило с компанией «Аэроджет» («Aerojet-General») контракт на исследовательские работы по возможности создания SRLD, пригодного для армейских целей. «Аэроджет» пришла к выводу, что наиболее подходящим является вариант с двигателем на перекиси водорода. Однако вскоре военным стало известно, что инженер Венделл Мур из компании «Белл Аэросистемс» уже несколько лет проводит эксперименты по созданию персонального реактивного устройства. Ознакомившись с его работами, военные в августе 1960 года решили передать заказ на разработку SLRD компании «Белл». Венделл Мур был назначен ведущим инженером проекта.
Типы ранцевых летательных аппаратов
Ракетный ранец Венделла Мура (Bell Rocket Belt)
Венделл Мур служил инженером-ракетчиком в «Белл Аэросистемс». Работу по созданию реактивного портфеля он начал ещё в 1953 году. Создание двигателя не представляло проблем. Неувязка состояла в достижении размеренного и устойчивого полёта, а для этого требовалось создать надёжную и комфортную систему управления портфелем в воздухе. Для этого была сделана экспериментальная «сборка», работавшая на сжатом азоте. Она имела раму из железных труб, в которую был «подвешен» испытатель. На раме шарнирно устанавливались два сопла. К соплам гибким шлангом был подведён азот давлением 35 атмосфер. Вентилем подачу азота на земле регулировал инженер-оператор, а испытатель подплечными рычагами наклонял сопла вперёд-назад, пытаясь достигнуть размеренного зависания на небольшой высоте. Снизу был привязан страховочный трос, чтобы «сборка» с испытателем не улетела очень высоко.
Первые тесты показали, что человек является очень неуравновешенным летающим объектом. Опытным путём было определено лучшее размещение реактивных сопел относительно центра масс, их направление, методы управления ими в полёте. В испытательных «полётах» участвовал сам Венделл Мур. Первые полёты были больше похожи на недлинные и резкие прыжки, однако последующие опыты оказались более успешными - в 1958 году удалось достигнуть размеренного полёта на высоте до 5 метров на протяжении трёх минут. Именно эти успехи впечатлили военных, предопределив выбор в пользу компании «Белл». Договор с Управлением транспортных исследовательских работ предусматривал изготовление, полётные тесты и демонстрацию готового SRLD.
В рамках этого проекта для портфеля сделали ракетный двигатель с тягой 280 фунтов. Общий вес портфеля составлял 57 кг. Рюкзак имел твёрдый стеклопластиковый корсет, сделанный по форме тела. К корсету жёстко крепились баллоны с топливом и азотом. Двигательная установка крепилась шарнирно и управлялась подплечными рычагами. Тяга двигателя изменялась регулятором, соединённым с ручкой на правом рычаге. Ручка на левом рычаге управляла отклоняемыми соплами. Пилот был пристёгнут к корсету ремнями.
Испытания сделанного портфеля осуществлялись в большом ангаре, со страховочным тросом. Первые 20 «привязных» взлётов сделал лично Венделл Мур. 17 февраля 1961 года из-за страховочного троса произошла катастрофа: В.Мур вместе с портфелем свалился на левый бок с высоты два с половиной метра. Далее функции лётчика-испытателя принял на себя инженер Гарольд Грэм. В конце концов, рюкзак и пилот были готовы к истинному полёту. Наконец 20 апреля 1961 года был совершён первый в истории свободный полёт на ракетном портфеле в отсутствие привязи. Грэм поднялся на высоту порядка 4 футов и полетел со скоростью приблизительно 10 км/ч. Он пропархал по прямой 108 футов и приземлился. Весь полет длился 13 секунд. Реактивный рюкзак перестал быть фантастикой.
В последующих полётах Грэм отрабатывал технику управления портфелем и осваивал более сложные приёмы пилотирования. В процессе испытаний были получены следующие показатели: длительность полёта - 21 секунда; дальность полёта - 120 метров; высота - 10 метров; скорость - 55 км/ч.
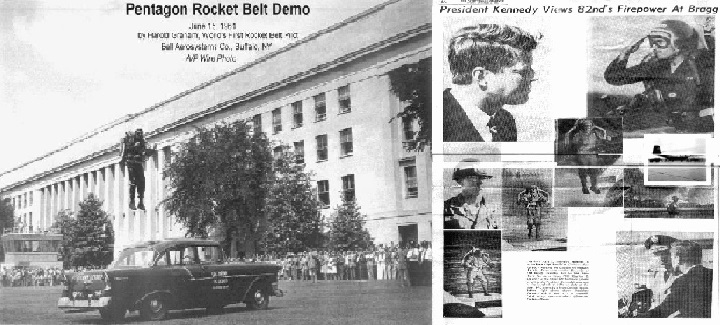
8 июня 1961 года рюкзак был продемонстрирован на публике - перед офицерами на военной базе Форт-Юстис. Затем последовали другие общественные показы, в том числе известный полёт во дворе Пентагона перед 3-мя тысячами служащих военного ведомства, которые с удивлением наблюдали, как Гарольд Грэм перелетает через легковушку.
11 октября 1961 года рюкзак был продемонстрирован лично президенту Кеннеди в процессе показательных манёвров на военной базе Форт-Брагг. Гарольд Грэм взлетел с амфибии LST, перелетел через полосу воды, приземлился в нескольких метрах перед президентом и лихо дал честь Главнокомандующему армии США. По свидетельству очевидцев, президент следил за полётом, открыв рот от изумления.
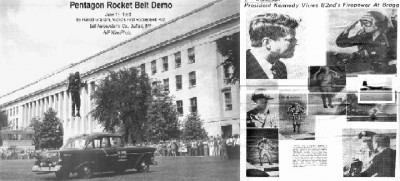
Полет Г. Грэма во дворе Пентагона
Армия же была разочарована. Наибольшая длительность полёта ракетного портфеля составляла всего 21 секунду, а дальность 120 метров. При всем этом рюкзак обслуживала целая команда персонала. За один полет расходовалось до 5 галлонов дефицитной перекиси водорода. По мнению военных, «Bell Rocket Belt» был эффектной игрушкой, нежели действенным транспортным средством. Расходы армии по договору с «Белл Аэросистемс» составили 150 000 долларов, ещё 50 000 долларов издержала сама «Белл». От предстоящего финансирования программы SRLD военные отказались, контракт был завершен.
В 1965 году «Белл Аэросистемс» заключила новый контракт с военным агентством ARPA — на разработку ранца с настоящим турбореактивным двигателем. Проект получил название «Jet Flying Belt», или просто «Jet Belt». Над проектом нового ранца работали Венделл Мур и Джон Налберт. Для нового ранца компания «Williams Research Corp.» по заказу «Белл» спроектировала и изготовила турбореактивный двигатель WR-19, с силой тяги 195 кгс и весом 31 кг. К 1969 году новый ранец был создан. 7 апреля 1969 года на аэродроме Ниагара Фоллз состоялся первый свободный полет турбореактивного ранца «Jet Belt». Пилот Роберт Куртер пролетел около 100 метров по кругу на высоте 7 метров, достигнув скорости 45 км/ч. Следующие полёты были более продолжительными, до 5 минут. Теоретически новый ранец мог находиться в воздухе до 25 минут и развивать скорость до 135 км/ч.
Однако, армия снова не проявила заинтересованности: ранец был сложным в обращении, слишком тяжёлым и небезопасным.

Ранцы Венделла Мура
Ранец «Bell Jet Flying Belt» так и остался экспериментальным образцом. В настоящее время он находится в музее «Williams Research Corp.».
В 1995 году конструкция ранца была усовершенствована. Инженеры Брэд Баркер, Джо Райт и Ларри Стэнли, а так же профессиональный изобретатель Дуга Малевик , построили новую версию ракетного ранца, который назвали «RB 2000 Rocket Belt». Этот ранец в основном повторяет конструкцию Венделла Мура, но сделан из лёгких сплавов и композитных материалов, имеет увеличенный запас топлива и повышенную мощность. Максимальная продолжительность полёта увеличена до 30 секунд, высота полета 30 метров, скорость 96 км/ч, дальность полета около 250 метров.
Martin Jetpack
Проект по созданию ранцевого ЛА продолжила компания Martin Aircraft. Эксперименты велись в семейном гараже. В 2005 году первым испытателем ранних образцов стала супруга Гленна. Мартин вспоминает: «Я все же принял некоторые меры предосторожности - привязал Martin Jetpack к столбу в гараже, чтобы Ванесса не улетела через крышу». Вскоре к работе, а затем и к тестам подключился сын.
В 2008 году Мартин отправился покорять Америку. Результат - более 900 публикаций по всему миру в течение нескольких дней. Мартин не раскрывает секретов конструкции ЛА, ограничиваясь краткой информацией на сайте и довольно общими заявлениями о том, что для понимания принципа действия Martin Jetpack достаточно разобраться в физике полета вертолета. Этот летательный аппарат рассчитан на вертикальный взлет и посадку. Конструктивно и по принципу действия он довольно схож с предшественниками, но имеет и ряд отличий: компрессоры вентиляторного типа, благодаря мощному двигателю обеспечивают тягу более 270 кг, винты заключены в кольцевые обтекатели. Современные композитные материалы позволили существенно оптимизировать вес устройства. С их применением изготовлены не только лопасти и воздуховоды, но и части топливного бака, защитный каркас и другие детали. Пустой аппарат весит 113 кг при габаритах 152х152х168 см. Двигатель в 200 л. с. получился мощный и прожорливый. Расход топлива, обычного бензина - 38 литров в час, в несколько раз выше, чем у среднего легкового автомобиля. При этом аппарат способен нести пилота весом от 64 до 127 кг.

Martin Jetpack
Jetman
Ранцевые летательные аппараты, рассмотренные выше, сконструированы по принципу вертикального взлета и посадки. Далее речь пойдет о ЛА, полет которых возможен с высоты и с парашютом для посадки.
Компания Martin Aircraft приступила к выпуску еще одной модели Personal Jetpack конструктора Ива Росси. В ЛА Ива Росси крыло жёстко закреплено на спине, и пилот управляет полётом, лишь двигая руками, ногами и головой. При этом манёвренность достаточна для выполнения фигур пилотажа различной сложности.
ЛА Ива Росси не предусматривает взлет с земли — на нужную для старта высоту он поднимается на самолете, вертолёте или воздушном шаре. Для посадки используется парашют, причем кроме посадочного и запасного, крыло Ива Росси оснащено также и собственным парашютом, который обеспечивает его мягкое приземление в случае, если возникнет необходимость сбросить крыло.
Вес ранца, полностью заправленного горючим (30 л. керосина) и 2 парашюта — 55 кг, размах крыла — 2 м. Максимальная скорость — 300 км/ч, продолжительность полета с полной заправкой — 10 мин. Модель претерпела конструкцию крыльев. Они стали не раскладными, а цельными и одновременно более компактными. Вместо двух двигателей под крыльями размещены две связки по две турбины в каждой — 4 реактивные «малышки» по 22 кг тягой каждая.
Летчик и изобретатель Ив Росси со своим напарником В. Реффетом на турбореактивном аппарате «Jetman» продемонстрировали фигуры высшего пилотажа. Они совершили свой полет над городом Дубаи рядом с самолетом Airbus A380.

Jetman Грифон
Грифон
У крылатого ранца Ива Росси есть конкурент — «Грифон». Это персональный ЛА, представляющий собой крыло с реактивным двигателем немецкой компании SPELCO GbR. Устройство сделано на базе небольшого беспилотного самолета-разведчика, который SPELCO поставляет ВВС Германии. Крыло, сделанное из легкого карбонового волокна, имеет в ширину примерно два метра. «Грифон» развивает скорость свыше 200 км/ч и может нести до 50 кг полезной нагрузки. Управляемые рули позволяют маневрировать в воздухе. Посадка производится путём отключения двигателей и вертикальным спуском на парашюте.
Изобретатели уверяют, что в ближайшем будущем такие глайдеры будут стоять на вооружении десантных частей всех армий мира. Пока же единственным пилотом-испытателем нового глайдера является немец Эрих Йелитко. В ходе показательных полетов в Париже он демонстрирвал настоящие фигуры высшего пилотажа. Например, проносился между пилонами, на которых стоит Эйфелева башня. Всего же он совершил уже более 50 прыжков с этим необычным летательным аппаратом.
Skyflash Jetpack
В отличие от разработки И.Росси, Skyflash Jetpack Фрица Унгера сконструирован так, чтобы иметь возможность оторваться от земли, а не при прыжке из самолета. Реактивный ранец в 55-фунтов имеет крылья, которые охватывают более 11 футов в ширину, и питается от двух микро-турбин дизельных двигателей самолета. Главной особенностью нового устройства является крыло с изменяемой геометрией, которое действует по принципу крыла пассажирского авиалайнера. Его общая длина чуть меньше трёх с половиной метров, но при взлёте составные части раскладываются для увеличения подъёмной силы, а затем снова складываются.
Реактивный ранец Skyflash готов оторваться от земли, как настоящий самолет. Он может развить скорость полета в 125 миль в час, достигает высоты 3500 метров, и может пролететь в общей сложности 62 км. Также может везти до 160 кг груза и осуществляет взлет с земли с помощью шасси на 10-дюймовых колесах. Skyflash управляется с 8-дюймового графического дисплея, который привязан к руке пилота: " На дисплее, который располагается на запястье, есть регулятор, который проведен к правой руке пилота. Взлет и рулевое управление достигается за счет сдвига веса тела пилотом. Чтобы повернуться, пилот вытягивает руку. Чтобы подняться вверх, ему необходимо согнуть колени".
Нет сомнений, что Skyflash - это амбициозный проект. Разработчики надеются, что он будет соответствовать их ожиданиям.

Skyflash Jetpack
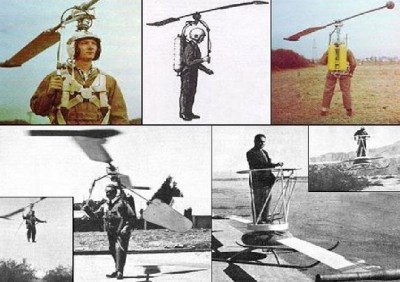
Вертолетные ранцы
К ранцевым ЛА относятся различные модели вертолетных ранцев. Значительный шаг вперед в этом направлении был сделан американскими и советскими (российскими) разработчиками.
Ранец-вертолет — персональный летательный аппарат, состоящий из вертолётного винта, двигателя и крепления, который прикрепляется к пилоту. На сегодняшний день существует несколько видов такого ранца:
с сидением/без него; одно/двухмоторные.
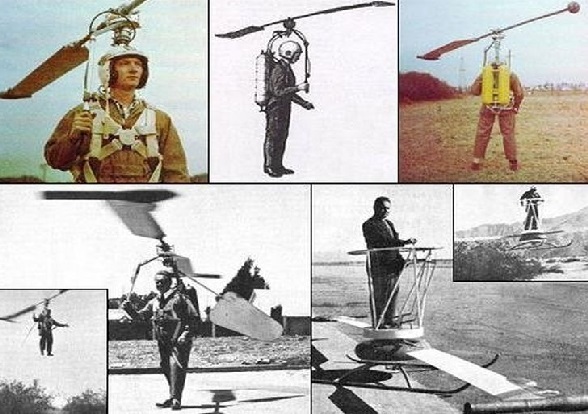
В начале 1950-х в обстановке полной секретности на одной из авиабаз близ Лос-Анджелеса проходил испытания аппарат под названием Pinwheel. Вид зависшего в воздухе пилота, над головой которого крутился винт, производил впечатление. Однако на земле испытатели не соответствовали образу бесстрашного супергероя так как ранец был трудноуправляемым, неустойчивым и крайне требовательным к мастерству испытателя при посадке.

Rotor-Craft RF-1 Pinwheel
В какой-то момент испытания ранца Pinwheel были прекращены. Военное ведомство США, по заказу которого калифорнийская фирма Rotorcraft Corporation конструировала вертолетный ранец, осталось недовольным максимальным временем беспосадочного полета. Запаса топлива хватало всего на 15 минут. В результате интерес к Pinwheel у военных пропал. Считается, что разработчиком первого в мире ранцевого вертолета был австриец Паул Буамгартл. В 1941 году он построил безмоторный планер Heliofly II-58, а годом позже по заказу Третьего рейха переделал его в вертолет Heliofly III-57, который предназначался бы для транспортировки солдат.
В этой модели для раскрутки лопастей использовались два легких двухтактных двигателя мощностью по 8 л.с., а на смену одному ротору пришли два вращающихся в разные стороны винта диаметром 4,76 м. Конструктор предположил, что для вертолетного ранца соосная схема подойдет лучше, чем классическая с хвостовым винтом. Известно, что весил ранец Буамгартла всего 20 кг, сохранилось даже несколько его фотографий, но хроники не дают ответа на главный вопрос — летал ли он. Известно лишь, что следующим аппаратом, созданным австрийцем, стал легкий вертолет, установленный на полозковое шасси, с двумя соосными роторами диаметром 6,1 м.

Baumgartl с его Heliofly
Больше об аппаратах Баумгартла и о нем самом ничего не известно. Однако сразу после окончания войны появились сведения о том, что подобный аппарат появился в Америке. Это было детище конструктора Пентекоста.
Любопытно, что изначально Хорес Пентекост предлагал свой вертолетный ранец военным в качестве замены неуправляемому парашюту. Но на испытаниях вскрылась неприятная особенность аппарата: когда «парашютист» приземлялся на ноги, ему сложно было удержать равновесие, особенно если под ногами были скользкий грунт или неровная поверхность. Падение же могло привести если не к гибели, то к травмированию пилота.
Чтобы решить вопрос с посадкой, Пентекост оснастил свой вертолетный парашют Hoppicopter шасси из трех колес. С ним пилоту было легко садиться и взлетать. Однако к этому моменту военные уже потеряли интерес к разработке Пентекоста. Hoppicopter так и остался прототипом.
Тем временем идеей вертолетного ранца загорелся американский авиаконструктор российского происхождения Евгений Глухарев. В 1950-х годах он работал в фирме Rotorcraft Corporation, той самой, что разработала модель Pinwheel для военных. В это время Глухарев стал известным разработчиком пульсирующих воздушно-реактивных двигателей (ПуВРД), и именно ими он оснащал свои первые реактивные ранцы MEG-1X (максимальная скорость — 90 км/ч, продолжительность полета — 18 минут) и MEG-2X.
Благодаря простоте и дешевизне маленькие ПуВРД в качестве привода вертолетных ранцев быстро нашли своих поклонников. Однако обнаружились два недостатка: расположенные на концах лопастей перегретые детали двигателей быстро деформировались в условиях высокой центробежной силы. Срок службы моторов и, соответственно, надежность оставляли желать лучшего. К тому же моторы на концах лопастей создавали высокое сопротивление вращению — это, с одной стороны, повышало расход топлива, а с другой — исключало спасение пилота выходом на режим авторотации. Этой причиной объясняется малая распространенность реактивных вертолетов. Так что, несмотря на всплеск интереса к реактивному приводу Глухарева, модели ранцев с механическим приводом вскоре снова стали преобладающими.
Вертолёты Глухарёва: MEG-1X, MEG-2X и MEG-3X
Помимо реактивного привода во времена Глухарева применяли компрессорно-реактивную схему — на борту вертолета находился компрессор с приводом от ДВС. Сжатый воздух подавался через каналы в лопастях к их концам, где он вырывался по касательной к окружности вращения и создавал необходимую тягу. Однако такая схема тоже, к сожалению, была далека от совершенства: по узким каналам было слишком сложно обеспечить подачу большого количества воздуха к концам лопастей. Как результат, эта система обладала слишком низкой эффективностью.
В 1962 году появился «классический» ранцевый вертолет — WS3 Mini-Copter. Датчанин Винсент Серемет успешно облетал эту конструкцию и даже собирался выпускать ее мелкосерийно, но до производства дело не дошло. А ведь более мощная модель WS4 Mini-Сopter, сконструированная датчанином, могла поднимать до 150 кг веса и лететь без посадки около 15 минут.
Разработкой вертолетных ранцев энтузиасты занимались и в России. Например, в 1948 году под Москвой можно было увидеть выпускника МАИ Курочкина, испытывавшего ранцевый автожир собственной конструкции. К сожалению, на испытаниях аппарат так и не удалось довести до желаемого уровня совершенства.
Весьма интересным был прототип складного вертолета Ка-56, который в начале 1970-х годов разрабатывали в ОКБ Камова. Вертолет соосной схемы можно было разобрать и сложить в футляр и так же легко собрать. Весь процесс сборки составлял не более десяти минут. Однако довести до летных испытаний этот проект не удалось.
Упоминания заслуживают и студенческие проекты микровертолетов. Студентами Куйбышевского авиационного института был построен одноместный микровертолет «Вихрь». Несущий винт вращали прямоточные воздушно-реактивные двигатели, расположенные на концах лопастей. Московские студенты тем временем для привода своего микровертолета МАИ X-5 использовали двухтактные двигатели от бензопилы «Дружба». Восемь таких моторов, объединенных в одном блоке, обеспечивали достаточную для подъема аппарата мощность — 48 л.с. Известны и другие оригинальные модели.
В середине 1980-х годов группа энтузиастов под руководством конструктора Виктора Шумейко разработала безмоторный автожирный ранец «Вертоплан». От предыдущих конструкций устройство отличалось тем, что пилот располагался в мягком подвесе под ротором, что обеспечивало хорошую эргономику. Аппарат успешно прошел испытания, но проект был приостановлен. Позже В. Шумейко разработал схему моторного ранца, которая может быть реализована в скором будущем. Примечательность разработки в том, что авторотация является рабочим режимом машины, так что отказ двигателя пилоту не страшен, к тому же успешно продуман вопрос эргономики при посадке и взлете. Поскольку аппарат пока не построен, рассказывать об особенностях его конструкции было бы преждевременно.
Модель ранец-вертолет Solotrek XFV компании Trek Aerospace разрабатывался как в одноместном, так и в двухместном вариантах. Имел следующие расчетные тактико- технические данные: скорость 130 км/ч, мощность ДВС 140 л. с., дальность полёта порядка 200 км,
максимальная продолжительность полёта 90 мин. Несмотря на многообещающие показатели, было выполнено несколько кратковременных полетов на привязи, после чего все работы по данному проекту были свернуты.

Ранец вертолет Solotrek XFV
В конце 90-х велись работы по созданию ранцевого десантно-штурмового вертолета «Юла». Разгон лопастей осуществлялся малыми реактивными двигателями. Личный ЛА имел две телескопические лопасти, которые в процессе вращения раздвигались от 3-х до 6-ти метров. Вес микровертолета без топлива составлял всего 25 килограмм. Топливный бак емкостью 20 литров обеспечивал продолжительность полета до 20-ти минут на скорости 150 км/ч и на рабочей высоте полета 1000 метров. Сам аппарат крепился к спине при помощи подвесной системы.
Юла
Позже была представлена утяжеленная версия «ночная бабочка», которая имела кресло для пилота. Предусматривался спуск в режиме авторотации. Самая последняя на сегодняшний день разработка в этой области принадлежит мексиканцу Хуану Монуэлю Лозано. Лопасти аппарата Libelula раскручиваются благодаря крошечным ракетным двигателям, которые заметно превосходят по характеристикам реактивный привод Глухарева. Есть надежда, что и авторотировать аппарат Лозано будет лучше, чем его реактивные предшественники.
Паралеты
К ранцевым ЛА так же можно отнести паралеты и мотопарапланы из-за простоты их конструкций.
Силовая установка этих летательных аппаратов крепится за спиной пилота, а подъемная сила создается парашютом. Полет на параплане возможен лишь с использованием энергии восходящих потоков воздуха. Если необходимо стартовать с равнины, парапланериста «затягивают» лебедкой. Скорость паралета – 50 км/ч, дальность полета – до 120 км, максимальная высота – 6800 метров, максимальная продолжительность полета – 1.5 часа.
На параплане, а точнее на различных его моделях: мотопараплане, паралете и аэрошюте можно взлететь и в полный штиль. Для полета на мотопараплане пилот использует небольшой мотор. Наличие мотора увеличивает вес всей системы, поэтому используется крыло с увеличенной подъемной силой.
Для старта на мотопараплане не нужны специальные условия. Можно взлетать с ровной поверхности без посторонней помощи.
Полеты на мотопараплане проходят на скорости 25 – 70 км/ч на высоте до 5,5 км. Из-за низкой скорости невозможно летать при сильном ветре, турбулентности или интенсивной термической активности. Ранцевый двигатель, который крепится на спине пилота, имеет еще одно название — парамотор. Его вес от 20 до 40 кг. С такой «нагрузкой» вполне возможно взлетать и садиться на ноги без использования дополнительных устройств. После небольшой пробежки крыло расправляется и поднимает пилота вместе с двигателем. После взлета пилот устраивается в сиденье и управляет полетом с помощью клевант и рукоятки управления двигателем. Кроме того пилот может «подруливать», смещаясь в подвеске и изменяя центр тяжести.
Наряду с моделями, испульзующими в качестве силовой установки ДВС, существуют модели парапланов с использованием реактивных установок. К таковым относится спидглайдер Троя Хартмана.

Спидглайдер с реактивным ранцевым двигателем Т.Хартмана
Благодаря большой продолжительности полета, паралеты и мотопарапланы сегодня являются одними из самых востребованных ранцевых летательных аппаратов.

Паралет
Установка для перемещения и маневрирования космонавта (УПМК)
Идея ранцевого ЛА была успешно применена для работы космонавтов в открытом космическом пространстве. Наиболее интересные решения были предложены советскими и американскими конструкторами. Первым устройством, созданным для перемещения в космосе, стал “реактивный пистолет” HHMU, стрелявший сжатым кислородом. Этот пистолет испытывался во время полета корабля “Джемини-4” Эдвардом Уайтом.
Следующей моделью был AMU (Astronaut Maneuvering Unit), который уже представлял собой настоящий реактивный ранец. Топливом для него служила жидкая 90-процентная перекись водорода, масса устройства составляла 75 килограммов. При выведении на орбиту AMU крепилось снаружи на приборно-агрегатном отсеке корабля. Работа астронавта в открытом космосе выглядела так: одетый в скафандр, он выходил из гермокабины, с помощью поручней переходил к устройству и надевал его как ранец. После этого можно было отделяться от корабля и маневрировать. Движение обеспечивали 16 небольших ракетных двигателей.
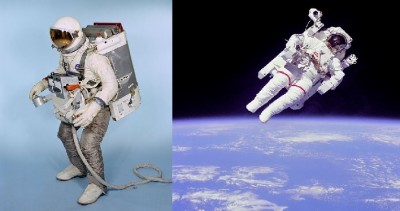
AMU MMU
Испытания системы состоялись в июне 1966 года во время полета корабля «Джемини-9А» и окончились провалом.
В то же время в Советском союзе было создано УПМК (“устройство перемещения и маневрирования космонавта”), которое разрабатывалось вначале для кораблей "Восход", а затем, в 1965-1966 годах, по программе военных орбитальных станций "Алмаз".
Установка в форме подковы как бы обнимала космонавта в скафандре. Перемещение обеспечивалось двумя блоками — разгонным и тормозным, каждый состоял из 42 пороховых двигателей. Срабатывание одного двигателя разгоняло космонавта на 20 сантиметров в секунду. Максимальное ускорение при запуске всех двигателей одновременно составляло 32 метра в секунду. Испытаний в космосе УПМК не проводилось.
Существовала также система ASMU, которая испытывалась в космосе внутри космической станции.
Первым (и пока что последним) устройством, позволившим астронавтам перемещаться по космосу без страховки, стал MMU (Manned Maneuvering Unit). Он представлял собой 150 килограммовую установку с 24 микродвигателями. В качестве топлива использовалось два шестикилограммовых баллона со сжатым азотом, а мощность двигателей позволяла разгонять “пилота” до 24 метров в секунду. Всего было построено два работающих экземпляра MMU. Во время миссии STS-41-B, астронавт Брюс Маккэндлесс протестировал MMU, удалившись от шаттла на расстояние 97.5 метра, став первым в истории человеком-спутником.
Позже NASA изменило стандарты безопасности – использование установок было сочтено слишком рискованным и в 1994 году их навсегда отправили на склад. Сейчас оба аппарата выставлены в музеях. Таким образом, те четверо астронавтов, что использовали MMU в 1984 году, пока что являются единственными в истории людьми, находившимися в открытом космосе без страховочного фала.
В СССР тоже был создан аналог MMU, известный как 21КС (СПК). Он был создан для работы совместно со скафандром “Орлан ДМА” на станциях типа “Мир” и кораблях “Буран”. Основу конструкции составлял массивный ранец, на котором размещались все системы. Сжатый воздух хранился в двух 20-литровых баллонах под давлением 350 атмосфер и выпускался через 32 сопла, обеспечивая ускорение до 30 м/с. При штатной эксплуатации СПК должно было работать без привязи, удаляясь на расстояние до 60 метров от орбитальной станции и до 100 метров от корабля “Буран”.
Пульты управления с тумблерами и рукоятками располагались на двух консолях — под обеими руками космонавта. По словам космонавта Александра Сереброва, “руки у космонавта жестко прикреплены к рукояткам” - так что в этом плане советский аппарат уступал MMU, который позволял астронавту использовать руки во время работы в открытом космосе.
Первые летные испытания 21КС провели 1, 5 февраля 1990 года космонавты Александр Серебров и Александр Викторенко на станции “Мир”. Они выходили в открытый космос из модуля “Квант-2” и удалялись от станции на 35-45 метров, но при этом использовали страховочную лебедку.
Больше испытаний 21КС не проводилась, сама установка все последующие годы находилась на станции "Мир" и после ее сведения с орбиты сгорела вместе с ней в атмосфере.
Несмотря на отказ от громоздких ранцевых систем, у нынешних астронавтов и космонавтов есть своего рода системы экстренного спасения на случай обрыва троса. Американская называется SAFER (Simplified Aid for EVA Rescue): она весит 38 кг и позволяет ускорять астронавта до скорости 3 м/с. Российский аналог называется УСК (устройство спасения космонавтов) и позволяет обеспечивать стабилизацию космонавта по трем осям с точностью 5 градусов.
Российские инженеры разработали реактивный ранец, который питается через солнечные батареи. Ранец будет прикрепляться к скафандру космонавта, а при необходимости зарядки он будет разворачивать солнечные батареи. Внутри него расположен электрореактивный двигатель, который превосходит все существующие аналоги по скорости и экономичности.
В качестве управления и тормоза спереди к скафандру будут прикреплены пара небольших двигателей, которые обеспечат безопасную встречу космонавта с кораблем.

Ракетный ранец с солнечными батареями
Jetlev
Реактивный ранец под названием Jetlev R200 предназначен для полётов над водой. Полностью рабочий прототип аналога ракетного ранца на водной тяге был завершен в 2008 году. Это первый летательный аппарат, который работает и имеет популярность. Он «привязан» к воде, однако это не умаляет его достоинств: сухая масса ранца — 14 килограммов, лодки — 295 кг, а длина её составляет 3,23 метра. 200-сильный четырёхтактный двигатель приводит в действие насос. Максимальная подъёмная сила ранца составляет около 1900 ньютонов.

Jetlev
100-литрового бака Jetlev хватает на 2-3 часа полётов в крейсерском режиме или на один час «полного газа». Максимальная скорость аппарата (с пилотом, весящим 68 кг) составляет 35 км/ч. Предельная высота подъёма достигает 8,5 метра. При наличии достаточно протяженной реки пилот Jetlev смог бы преодолеть почти 50-70 км.
Устройство и принцип действия ракетного ранца
Все существующие ракетные ранцы основаны на конструкции ранца «Bell Rocket Belt» Венделла Мура. Ранец Мура конструктивно состоит из двух основных частей:
1. Жёсткий стеклопластиковый корсет, закреплённый на теле пилота системой ремней. Корсет имеет сзади металлическую трубчатую раму, на которой установлены три баллона: два с жидкой перекисью водорода и один со сжатым азотом.
2.Ракетный двигатель, подвижно установленный на шаровом шарнире в верхней части корсета. Сам ракетный двигатель состоит из газогенератора и двух жёстко соединённых с ним труб, которые заканчиваются реактивными соплами с управляемыми наконечниками. Двигатель жёстко соединён с двумя рычагами, которые проходят под руками пилота. Этими рычагами пилот наклоняет двигатель вперёд или назад, а также в стороны. На правом рычаге установлена поворотная рукоятка управления тягой, связанная тросиком с клапаном-регулятором подачи топлива в двигатель. На левом рычаге установлена рулевая рукоятка, которая гибкими тягами связана с управляемыми наконечниками реактивных сопел.
Действие ракетного двигателя основано на реакции разложения перекиси водорода: 2H2O2 → 2H2O + O2.
Реакция протекает с выделением большого количества теплоты.
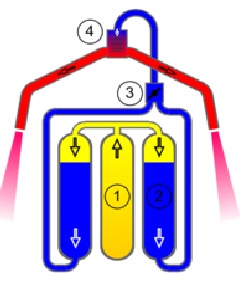
Принцип действия двигателя ракетного ранца
На рисунке обозначены баллоны с перекисью водорода и баллон со сжатым азотом (давление около 40 атм). Пилот поворачивает рукоятку управления тягой двигателя, и клапан-регулятор (3) открывается. Сжатый азот (1) вытесняет жидкую перекись водорода (2), которая по трубкам поступает в газогенератор (4). Там она вступает в контакт с катализатором (тонкие серебряные пластины, покрытые слоем нитрата самария) и разлагается. Образовавшаяся парогазовая смесь высокого давления и температуры поступает в две трубы, выходящие из газогенератора (трубы покрыты слоем теплоизолятора, чтобы сократить потери тепла). Затем горячие газы поступают в реактивные сопла (сопло Лаваля), где сначала ускоряются, а затем расширяются, приобретая сверхзвуковую скорость и создавая реактивную тягу. Вся конструкция проста и надёжна, ракетный двигатель не имеет ни одной движущейся части. Но, распространение ранцев этого принципа действия сдерживается дефицитом концентрированной перекиси водорода, которая уже не производится крупными химическими компаниями.
Особенности устройства турбореактивного ранца.
Ранец «Jet Belt» имеет турбореактивный двигатель WR-19. Масса двигателя 31 кг, тяга 195 кг, диаметр 30 см. Двигатель установлен вертикально, воздухозаборником вниз. Входящий воздух сжимается турбиной и разделяется на два потока. Один поток идёт в камеру сгорания. Второй поток проходит между двойными стенками двигателя, затем смешивается с потоком выходящих горячих газов, охлаждая их и защищая пилота от высокой температуры. В верхней части двигателя смешанный поток разделяется и поступает в две трубы, ведущие к реактивным соплам. Конструкция сопел позволяет отклонять реактивную струю в любую сторону. Топливо (керосин) находится в баках по бокам двигателя. Управление турбореактивным ранцем похоже на управление ракетного ранца, но пилот уже не может наклонять всю двигательную установку. Маневрирование выполняется только отклонением управляемых сопел. Наклоняя рычаги, пилот отклоняет реактивную струю обоих сопел вперёд, назад или в стороны. Поворотом левой рукоятки пилот поворачивает ранец. Правая рукоятка, как обычно, управляет тягой двигателя. Запуск реактивного двигателя осуществляется с помощью порохового пиропатрона. На испытаниях для запуска использовали передвижной стартер на специальной тележке. Имеются приборы для контроля работы двигателя и рация для связи и передачи телеметрической информации наземным инженерам.
Сверху на ранце установлен парашют (используется стандартный десантный запасной парашют). Он эффективен только при открытии на высоте более 20 метров.
Ранцевый летательный аппарат XXI века.
Фантастический образ человека бороздящего бескрайние просторы неба с турбореактивным двигателем за спиной, очень сильно повлиял на массовую культуру. Идею создания ранцевого летательного аппарата подхватили частные компании и на сегодняшний день больше всего успехов в этом деле добились компании JetPack Aviation, Martin Aircraft и проект Ива Росси Jet Man.
Первые, создатели JB-9 Дэвид Мейман и Нельсон Тайлер работали над устройством почти 10 лет и создали несколько прототипов летательных аппаратов. Пока нет данных о том, когда устройство выйдет в продажу и по какой цене, но работы в этом направлении ведутся.

JB-9
Вторые уже продают серийную модель Personal Jetpack по цене 150 тыс. долларов за штуку и обещают бюджетный ранец в 2017-ом году. Martin Jetpack позиционируется как средство для развлечения и активного отдыха. Еще Мартин сообщает, что его компания ведет переговоры об аренде земли рядом с аэропортом для организации парка развлечений, где за 10-минутный полет стоимостью около 215 долларов можно будет получить массу острых ощущений.

Personal Jetpack
В 2015 году появилась информация о том, что ранцами Martin Jetpack оснастили дубайских пожарных. Предполагают, что джетпаки позволят бороться с огнем снаружи на максимальной высоте и вести наблюдение. Пока информации о том, использовались ли джетпаки при борьбе с пожарами, не было.
Третий — Ив Росси — создал собственную модель Jet Man. В отличие от джетпака Мартина, речи о коммерческом выпуске Jetman пока не идет. Это скорее игрушка для экстремалов.
Не менее популярным водным аттракционом стало и изобретение Jetlev Рэймондом Ли. В настоящее время он позиционируется не как транспортное средство, а как снаряд для активного отдыха.
Заключение
Как видно из исследования, джетпаки давно перестали быть фантастикой. Современные технологии позволяют создавать легкие и достаточно безопасные индивидуальные летательные устройства, которые поражают нас своими возможностями. Но на сегодняшний день мало кто сможет себе позволить стать обладателем этого ЛА. Думаю, в первую очередь аэроранцы получат распространение в армии и различных спецслужбах (МЧС, ГИБДД, промышленный альпинизм, пограничная служба, метеоразведка, пожарная служба, геологоразведывательные работы, также воздушный спорт и туризм). А вот в то, что они могут стать заменой для привычных способов передвижения обычных людей в ближайшем будущем, пока верится с трудом. Но технологии не стоят на месте и возможно спустя некоторое количество лет, ранцевые летательные аппараты станут повседневным, обыденным видом транспорта.
Список используемых источников
- Бирюков Ю.В. 50 лет со времени разработки А.Ф.Андреевым проекта ракетного индивидуального летательного аппарата (1921 г.) // Из истории авиации и космонавтики. М. – 1971 г. - №12
- Н.Корзинов. Супермен на полминуты: молодец с ранцем//Популярная механика – 2006 г. - №9
- Н.Корзинов. До и после Карлсона: вертолетные ранцы//Популярная механика - 2009 г. - №79
- Реактивный ранец. URL: http://dic.academic.ru/dic.nsf/ruwiki/51380
- Где мой реактивный ранец? URL: http://podkofeek.ru/capuchino/116.html
- Newikis. Реактивный ранец. URL: https://www.newikis.com/ru/wiki/Джетпак
- Проект летательного аппарата Grasshopper: «Реактивный ранец Эда Курчевски». URL: https://topwar.ru/86054-proekt-letatelnogo-apparata-grasshopper-reaktivnyy-ranec-eda-kurchevski.html
- Реактивный двигатель Мело. URL: http://epizodsspace.no-ip.org/bibl/rynin/rak-i-dvig/rynin-rakety3i.html
- Проект реактивного ранца Jetvest. URL: https://topwar.ru/84833-proekt-reaktivnogo-ranca-jetvest.html
- Martin Jetpack – персональный летательный аппарат. URL: http://venture-biz.ru/tekhnologii-innovatsii/280-martin-jetpack
- Что такое реактивный рюкзак? URL: http://new-best.com/miscellaneous/chto-takoe-reaktivnij-ranets.htm
- 12. Устройства передвижения космонавта. URL: http://galaxy-science.ru/o-sajte/item/114-peredvizheniya-kosmonavtov-v-kosmose.html
Реактивный ранец. URL: http://e-accel.ru/faivtovtvineogaip/Реактивный_ранец
Ив-Росси – человек-самолет. URL: http://samoe-samaya.ru/transport/iv-rossi-chelovek-samolet.html
- Ив-Росси – человек-самолет. «Нереальный полет». URL: https://magazinka.info/forum/болтаем-за-жизнь/прочее-ac/5995-ив-росси-человек-самолет-нереальный-полет-jetman-yves-rossy
- «Грифон» сделает десантников суперменами. URL: https://utro.ru/articles/2008/04/25/733578.shtml
- Реактивный ранец Skyflash. URL: http://nauka21vek.ru/archives/47223
- До и после Карлсона: вертикальные ранцы. URL: http://www.popmech.ru/adrenalin/9091-do-i-posle-karlsona-vertoletnye-rantsy/
- Rocket Helicopter. URL: http://www.tecaeromex.com/ingles/libe-i.htm
- Что если совместить параплан с мотором? Мотопараплан. URL: http://pro-extrim.com/vysota/paragliding/paraplan-s-motorom.html
- Спидглайдер с реактивным ранцевым двигателем. URL: http://www.vnebe.ru/content/спидглайдер-с-реактивным-ранцевым-двигателем
- Устройства передвижения космонавта. URL: http://galspace.spb.ru/orbita/26.html
- Реактивный ранец Jetlev R200. URL:http://www.membrana.ru/particle/16123
- Установки для перемещения в открытом космосе. URL: http://kiri2ll.livejournal.com/48726.html
- Реактивный ранец, питающийся от солнечных батарей. URL: http://ghhauto.ru/novosti/nauka/3995-dennewjkbv.html
|