Автор: Кошманов Илья Игоревич
Возраст: 18 лет
Место учебы: отделение среднего профессионального образования филиала Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Уфимский государственный авиационный технический университет» в г. Кумертау «Авиационный технический колледж»
Город, регион: Республика Башкортостан, г. Кумертау
Руководитель: Хазиева Диана Ильдаровна, отделение СПО филиала ФГБОУ ВПО «УГАТУ» в г. Кумертау «Авиационный технический колледж»
Историко-исследовательская работа на тему:
Мультироторные системы: какова история и есть ли перспективы развития в будущем?
План историко-исследовательской работы:
Введение
1 История мультироторных систем
2 Мультикоптер. Его строение и управление
3 Виды мультироторных систем
4 Сферы деятельности мультикоптеров
5 Мультикоптер как летательный аппарат способный поднять в воздух человека
6 Практическая часть
Заключение
Список источников
Введение
Актуальность. С древних времен человек мечтал летать как птица. И, наверное,люди думали, что в будущем все будут летать на летающих машинах, каждый сможет посетить те места, которые мечтал увидеть. Сегодня эта мечта осуществилась. Человечество построила много разновидностей летательных аппаратов, среди них беспилотные летательные аппараты, которые называются мультикоптеры. Некоторых людей, как и меня, заинтересовал этот летательный аппарат, у которого большое будущее.
Поэтому целью историко-исследовательской работы является повышение уровня знаний при изучении и конструировании мультикоптерных систем.
Для достижения цели в научно-исследовательской работе поставлены и решены следующие основные задачи:
- познакомиться с историей развития мультироторных систем;
- изучить устройство и принцип действия мультикоптеров;
- выявить различия в разновидностях конструкций мультироторных систем;
- дать обоснование, что использование мультикоптеров - это шаг в развитии малой авиации.
Практическая значимость работы. Разработана и выполнена действующая модель квадракоптера.
1. История мультироторных систем
Первым действующим прототипом квадрокоптера (и заодно всех ныне существующих вертолетов) был вертолет Ботезата, поднявшийся в воздух в далеком 1922 году. Более того, в рамках одного из экспериментальных полетов этот аппарат смог поднять на высоту в 4 метра груз весом 450 кг (рис. 1).

Рисунок 1 - Испытания вертолета Ботезата
Георгий Александрович Ботезат был американцем российского происхождения, изобретателем, профессором Петроградского технологического института. Также он окончил два института, в Харькове и Бельже (Бельгия), был инженером-электриком. Но главное, почему его помнят, это вертолет.
Испытания одного из первых вертолетов, оснащенного четырьмя винтами, начались в 1922 году. Многовинтовая схема позволяла упростить управление аппаратом: поворот осуществлялся изменением положения носовой части вертолета. Каждый винт изменяемого шага состоял из шести лопастей. В конструкции использовались растяжки из струн от рояля.
Разработка квадрокоптера велась на деньги армии США. Целью работы создателей было создание летательного аппарата с вертикальными взлетом и посадкой. Г.Ботезат нехотел тратить силы на разработку прототипов и он сразу принялся строить полноразмерный аппарат.
На разработку было выделено и потрачено 200000 долларов. Для первой половине прошлого века это былаогромная сумма, но тем не менее проект был прикрыт из-за некоторых проблем.В частности, чтобы просто лететь вперед, был нужен попутный ветер. Ботезат хотел продолжить работу и исправить эту проблему, при этом надо было либо дифференцированно подавать крутящий момент на роторы, либо делать управляющие рули под роторами. Поэтому изобретение хвостового ротора вертолета и автомата перекоса вынудило забросить это направление как неперспективное на тот момент.
Существует другая версия возникновения мультикоптеров. В 1922 году Этьен Омишен разработал первый квадрокоптер, который был признан успешным. В ноябре 1922 года, изобретатель совершил первый полет на своем квадрокоптере Oehmichen. Данный аппарат представлял собой улучшенный вариант вертолета с восьмью небольшими вертикально установленными рулевыми винтам (пять из которых способствовали поддержанию равновесия и управления относительно осей, два предназначались для горизонтального полета и один для осуществления поворота), которые вращались в противоположном направлении относительно крупных несущих винтов.

Рисунок 2 – Квадрокоптер Oehmichen
2. Мультикоптер. Его строение и управление
Мультикоптер- это летательный аппарат с произвольным количеством несущих винтов, вращающихся диагонально в противоположных направлениях.
В основном мультикоптер состоит из:
- полётного контроллера;
- рамы;
- моторов;
- регуляторов скорости;
- аккумуляторов;
- винтов;
- пульта радиоуправления;
- радиоприемника.
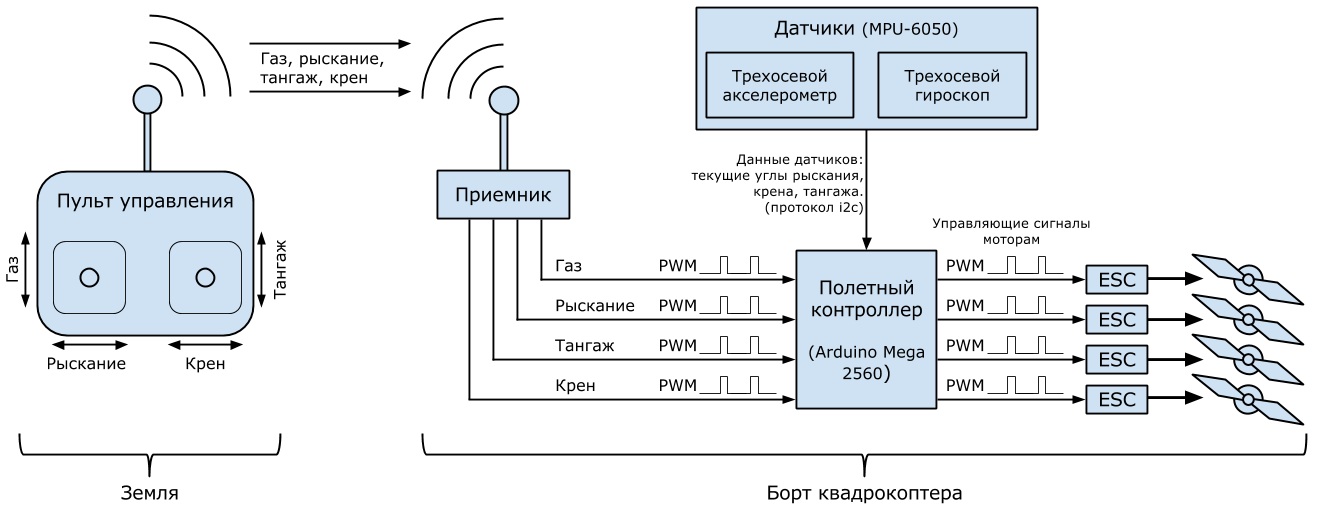
Главной частью мультикоптера является его полетный контроллер (мозг), который переводит команды радиоуправления в команды двигателям. Чтобы обеспечить стабильный полет, мультикоптеры обязательно снабжают тремя гироскопами, фиксирующими угол наклона и поворота.Три эти угла принято называть крен, тангаж и рыскание. Крен - это поворот аппарата вокруг его продольной оси (оси, которая проходит от носа до хвоста). Тангаж - это поворот вокруг его поперечной оси (клюет носом, задирает хвост). Рыскание -поворот вокруг вертикальной оси. Как вспомогательный инструмент, иногда, также используется акселерометр, данные от которого позволяют процессору устанавливать абсолютное горизонтальное положение, а так же датчик барометра, который позволяет фиксировать аппарат на нужной высоте. Кроме этого применяют сонар или УЗ-дальномер, который используется для более точного удержания высоты и автономной посадки, а также для облёта препятствий.GPS-приемник, позволяющий записывать маршрут полёта заранее, с компьютера и на оборот, позволяет мультикоптеру автоматически совершать полет по заданным точкам, а также автоматически возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала.
Схема работы основных компонентов мультикоптера (квадрокоптера) представлена на рисунке 3.

Рисунок 3 – Схема работы компонентов мультикоптера
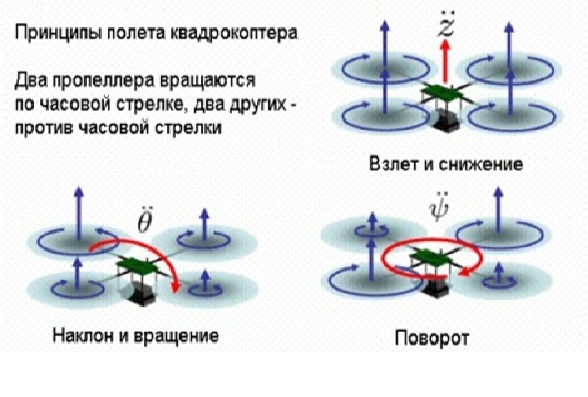
Мультикоптеры имеют два или более винтов постоянного шага (автомата перекоса, в отличие от одно- и двух винтовых аппаратов, нет). Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина - против, поэтому хвостовой винт мультикоптеру не нужен.
Маневрируют мультикоптеры путём изменения скорости вращения винтов (рис.4). Например: при ускорении всех винтов - подъём; при ускорении винтов с одной стороны и замедлении с другой - происходит движение в сторону; при ускорении винтов, вращающиеся по часовой стрелке, и замедление винтов вращающихся против– поворот.
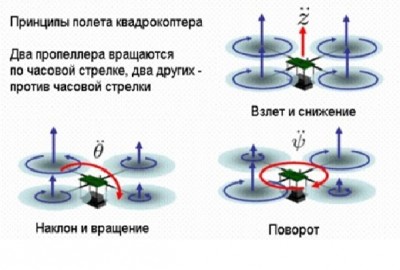
Рисунок 4 - принцип полета квадрокоптера
3. Виды мультироторных систем
Существуют множество разновидностей мультикоптеров, различающихся количеством и расположением двигателей относительно центра аппарата. Основные разновидности включают в себя трех-роторные (трикоптеры), четырех-роторные (квадрокоптеры), шести-роторные (гексакоптеры), восьми-роторные (октокоптеры) и даже более сложные конфигурации.
У каждого из разновидностей существуют свои достоинства и недостатки.
Трикоптеры (рис.5)
Особенности:два передних мотора вращаются в противоположных направлениях, а третий в любую сторону. Один из моторов там располагается на, нанизанной на ось, подвижной платформе, угол поворота которой изменяетсясервоприводом - так и осуществляется поворот аппарата вокруг своей оси.

Рисунок 5 - Трикоптер
Достоинства:низкий вес, компактность, это самые дешевые мультикоптеры, поскольку для их постройки требуется всего 3 мотора и 3 регулятора скорости.
Недостатками таких аппаратов является сложная конструкция, маленькая грузоподъемность и при отказе одного двигателя, аппарат неизбежно падает.
Квадрокоптеры (рис.6)
Достоинства:простая конструкция без поворотных механизмов.
Недостатки:при отказе одного двигателя следует неизбежное падение.

Рисунок 6 - Квадрокоптер
Гексакоптеры (рис.7)
Они располагают в себе все положительные черты квадрокоптеров.
Достоинства:при отказе одного мотора аппарат не падает, большая грузоподъемность, стабильность, маленькая чувствительность к ветру.
Недостатки:короткое время полёта, большие габариты и высокая цена.

Рисунок 7 - Гексакоптер
Октокоптеры и другие многороторные конфигурации
Достоинства: крайне стабилен и не чувствителен к ветру, при отказе одного и даже двух моторов – аппарат не падает! Очень большая грузоподъемность (до 16-17 кг). Только этим аппаратам можно доверить подъем в воздух профессиональных, тяжелых и дорогих фото-видео камер.
Недостатками этих аппаратов является огромное энергопотребление и высокая цена.

Рисунок 8 - Октокоптер
Существуют варианты схем мультикоптеров, у которых на одном луче расположены два мотора друг над другом.
Достоинства: более стабильны при отказе моторов, имеют меньшие габариты при, практически, тех же тяговых характеристиках.
Отдельно стоит отметить экспериментальные аппараты: бикоптеры, квадрокоптеры с изменяемым шагом пропеллеров, квадрокоптеры с двигателями на импеллерах, однако они не получили какого-либо распространения.А так же нельзя забывать о гибридах мультикоптеров, такие как водяной гексакоптер и гибрид самолет-квадрокоптер.
Еще мультикоптеры различаются по размерам. Величиной от 10 до 400 миллиметров являются обычно офисные или гоночные летательные аппараты
Величиной от 400 мм и выше – мультикоптеры, которые используются для съемок или так называемые профессиональные мультикоптеры.
4. Сферы деятельности мультикоптеров
Для чего же собственно нужны мультикоптерыв XXI веке, ведь существуют и простые вертолеты? Ответ достаточно прост. Мультироторные системы, за счет большего количества несущих винтов, имеют лучшую устойчивость в воздухе. Ими проще управлять и они намного устойчивее к порывам ветра. Наличие нескольких силовых установок дает большую, чем у вертолетов тягу, что позволяет брать на борт большой вес.За счет большей стабильности увеличивается и безопасность полетов. Более того, гексакоптеры и октокоптеры не боятся поломки одного и даже двух несущих роторов. При остановке двигателя из-за поломки, такие системы компенсируют тягу другими роторами и продолжают выполнять свою функцию. Ни один вертолет не способен летать с поломкой двигателя. К тому же самым главным достоинством мультикоптеров является простота его конструкции.
В современном мире есть множество сфер, где могут найти применение мультикоптеры. Начать можно с простого любительского авиа-моделирования, ведь любительские полеты на моделях – это отличное развлечение. Кроме того, благодаря этим летающим дронам в авиамоделизме появилось новое направление, связанное с гонками мультикоптеров.
Мультироторы являются отличным аппаратам для проведения фото и видеосъемки. Такая съемка показывает мир с необычных ракурсов. С помощью этой полезной функции современные мультикоптеры позволяют быть полезными для сбора материала для СМИ.
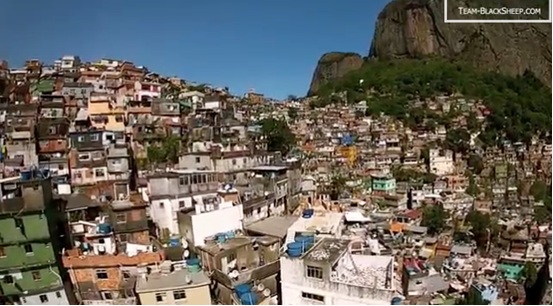
Современная журналистика – это репортажи из таких мест и локаций, где установить обычную камеру или пригласить оператора-фотографа часто невозможное дело. Квадрокоптеры с установленной камерой позволяют отснять панорамное видео и фото в горячих точках, в местах массовых гражданских протестов или празднований с высоты птичьего полёта, при этом не используется дополнительный персонал (рис.9).

Рисунок 9 – Съемка, выполненная с помощью мультикоптера
Еще одно полезное дело, которым могут заняться дроны- защита дикой природы (рис.10) путем ее мониторинга без необходимости появления человека в среде обитания исчезающих видов животных. Испытание беспилотников в этой роли уже провела команда индонезийских ученых, которые использовали летающие устройства для наблюдения за группой исчезающих обезьян.
Рисунок 10 – Наблюдение за поведением животных в дикой природе
Телеканалом National Geographic мультироторный аппарат использовался для работы в недоступных человеку местах, а именно рядом с вулканом находящимся в опасном состоянии. Для безопасности персонала использовался дрон, который производил замеры на поверхности возле жерла вулкана (рис.11).

Рисунок 11 - Съемки в опасных местах
При помощи камеры и мультироторного летательного аппарата можно совершать облет лесных массивов, парков, заповедников и производить осмотр на наличие лесных пожаров или других угроз (рис. 12).

Рисунок 12 - Мониторинг обнаружения лесных пожаров
Мультироторный летательный аппарат может быть использован для охраны объектов, участие в военных целях, участия в геодезической съемки и т.д.
Профессиональное применение мультикоптеров весьма широкое. Эти БПЛА позволяют переносить груз в среднем от 5 до 10 килограммов, что позволяет доставлять различные предметы в труднодоступные места в пределах грузоподъемности дрона.
С помощью этой способности мультикоптеры участвуют в доставке продуктов питания (рис.13). Самый простой способ купить товары в магазине - загрузить соответствующее приложение онлайн-ритейлера и сделать заказ. Однако использование дронов в интернет-торговле означает, что покупатели могли бы получать свои обновки в тот же день. Два гиганта интернет-торговли, Dominos и Amazon, осознают потенциал легких автономных летательных устройств и заявляют о возможности их использования для доставки покупок клиентам уже в ближайшем будущем.

Рисунок 13 – Транспортировка груза потребителям
Стихийные бедствия и войны требуют обеспечения медикаментами и предметами чрезвычайной помощи пострадавших и нуждающихся. К счастью, существуют беспилотники, которые могут решить эту задачу более эффективно. Авиационная компания Matternet развивает сеть для транспортировки лекарств в зоны бедствий.

Рисунок 14 - Доставка медикаментов
Работа на ферме очень трудоемка. Фермерам приходится работать в любую погоду, обеспечивая выращивание и уборку урожая на больших территориях. Но их жизнь может стать легче благодаря специальным дронам, которые, используя современные технологии, будут следить за ситуацией на полях. Особенно они будут полезны в крупных хозяйствах. Так же их используют для распыления отравляющих и удобряющих средств.

Рисунок 15 –Использование дронов в сельском хозяйстве
5. Летательный аппарат способный поднять в воздух человека
И все-таки самым главным шагом в развитии мультикоптеров было превращение дронов из простых БПЛА в летательные аппараты, которые способны поднять в воздух человека.
Компания e-volo объявила о начале «новой эры городской мобильности». Немецкий регулирующий орган выдал разрешение на полеты пилотируемого мультикоптера Volocopter.
Для управления Volocopter, в отличие от обычных вертолётов, не требуется таких механических устройств как автомат перекоса, изменяемый шаг винта, хвостовой винт и руль направления. Винты неподвижно закреплены на осях электродвигателей. Изменение высоты полёта, поворот и горизонтальное движение обеспечивается исключительно за счет уменьшения или увеличения оборотов двигателей. Дополнительный (планируемый) двигатель в продольной оси, устанавливаемый позади фюзеляжа, обеспечивает дополнительную тягу для горизонтального полёта. Электро-дистанционное управление осуществляется джойстиком. Положение и направление полёта автоматически поддерживают несколько независимых и взаимно контролируемых компьютеров (резервирование), управляя индивидуальной скоростью вращения каждого двигателя.
Первая практическая реализация концепции Volocopter была осуществлена e-volo с одноместным прототипом VC 1, который совершил первый в мире полностью электрический пилотируемый полёт.

Рисунок 16 –Прототип Volocopter VC 1
Компанией e-volo был построен двухместный VC 200, который оснащен 18 отдельными двигателями.

Рисунок 17 - Двухместный пилотируемый мультикоптер VC 200
Технические характеристики двухместного Volocopter:
скорость 100 км/ч;
достижимая высота полёта около 1980 м;
размеры: высота 2,20 м, диаметр рамы с двигателями 9,80 м;
взлётный вес 450 кг;
продолжительность полёта около 1 часа.
Volocopter VC 200 оснащён системой спасения спарашютом. В обычных вертолётах и автожирах путь наверх заблокирован несущим винтом и использование полноценной системы спасения невозможно. Ранее только некоторые вертолёты имели систему спасения: например, вертолёты Камова- отделением с помощью взрывов лопастей обоих несущих винтов с последующим катапультированием. Также такой системой оснащены вертолёты ОКБ "Ротор".
Элементы корпуса и винты изготовлены из композитных материалов. Питание для электродвигателей может быть как исключительно от литиевых аккумуляторов, так и от гибридной силовой установки с ДВС и электрогенератором. Винты разнесены на достаточное расстояние для уменьшения их вредного взаимодействия, что также исключает возможность их перехлёста. Благодаря меньшей скорости вращения концов лопастей винтов обеспечивается малая шумность по сравнению с вертолётами традиционной схемы. Мультикоптер также отличается малой вибрацией по сравнению с обычными вертолётами.
В случае уменьшения уровня заряда аккумуляторных батарей ниже определенного порогового значения или поломки подзаряжающего их двигателя внутреннего сгорания летательный аппарат начинает автоматически снижаться, несмотря на команды пилота о продолжении полёта, и совершает мягкую посадку. Отсутствие автомата перекоса и редукторов для винтов, возможность полёта при отказе до шести двигателей и наличие аварийного парашюта обеспечивают повышенную надёжность и безопасность.

Рисунок 18 - Volocopter VC200 в разобранном состоянии
Аппарат отличается простотой управления. Для получения лицензии пилотом обычного вертолёта требуется пройти длительный и дорогой курс обучения, но в случае с Volocopter VC200 достаточно всего пяти часов подготовки. Также имеется система стабилизации полёта. В отличие от обычного вертолёта, при потере управления над VC200 он просто зависает на месте, пока пилот не восстановит контроль. Этот вертолёт также можно легко разбирать и собирать, что позволяет хранить его в обычном гараже (рис.18).
6. Практическая часть. Модель квадрокоптера
Для того, что бы проще было понять работу и конструкцию мультикоптера, я собрал наглядную модель квадрокоптера. Для этого мне понадобились детали, представленный в таблице 1.
Таблица 1 – Необходимые комплектующие для модели
|
Комплектующие
|
Технические характеристики
|
|
Двигатели SkyRC Х2830 4шт.
|
Обороты двигателя 900 оборотов*В
Число банок аккумулятора до 4s
Максимальный ток 28A
Размеры (диаметр ×высота) 28 × 30мм
Диаметр вала3мм
Вес40г
Максимальная мощность 250Вт
|
|
Карбоновые винты RC timer,4шт.
|
Длина10 дюймов
Шаг винта 5 дюймов
|
|
Радиопередатчик Radiolink AT10
|
Размеры18 × 9,5 × 22 см
Вес 0,95кг
Частота2,4 ГГц (2400MHz ~ 2485MHz)
Рабочее напряжение 8,6 ~ 15 В
Рабочий ток<95мA;
Расстояние управления 1,1км на земле и
2км в воздухе
10 каналов, 8 ~ 10 каналов можно настроить;
Экран78 × 52 мм, 320 × 480 пикселей
|
|
Полетный контроллер Naza m lite
|
Поддерживаемые конфигурации:
Поддерживает выход ESC -400 Гц частота обновления
Рекомендуемый передатчик 2,4 ГГц
4 канала минимум
Рабочий диапазон напряжения:
- главный контроллер 4,8 ~ 5,5 В;
- сигнализатор и UBEC вход 7,4 ~ 26 В (2S ~ 6S Lipo)
Потребляемая мощность:
- максимальная 1,5 Вт
- нормальная 0,6 Вт
Рабочая температура от - 10° C ~ 50° C
Размеры:
- главный контроллер45,5×31,5×18,5 мм
- сигнализатор и UBEC 32,2×21,1×7,7 мм
Вес главного контроллера 25г
Точность GPS:
- по высоте ± 0,8 м,
- горизонту ± 2,5 м
Макс. угол наклона 45°
Взлёт / посадка ± 6 м/с
|
|
Приемник Radiolink R9D 9ch
|
Количество каналов - 9
Рабочий диапазон напряжения 4,8~10 В
Дальность действия > 900 м
Габариты 43×24×15 мм
Вес 10,7 г
|
|
Аккумулятор LiPo Wild Skorpion 2200mah
|
Емкость 2200 мА/ч
Кол-во банок - 3s
Напряжение 11,1 В
Отдаваемый ток 30 А
|
|
Регулятор оборотов (скорости) Hobbywing x-rotor 40A
|
Рабочий ток 40 A продолжительный
Максимальный ток 60 A
Диапазон рабочего напряжения 3-6s Lipoly
Вес 28 г (включая провода, разъемы, термоусадку)
Размеры 68 × 25 мм × 8,7 мм
|
|
Рама квадрокоптера f450
|
Вес рамы 282 г
Диагональная база 450 мм
|
Кроме этих деталей нужно иметь посадочные шасси.
После того как приобретены все комплектующие детали, можно приступать к процессу сборки (рис.18).
Для начала собирается рама. К интегральной плате припаиваются регуляторы оборотов (ESC),на одном конце которых находятся провода «плюс» и «минус». Подключаются они по цветам, соблюдая полярность. А вот на другом конце регуляторов находятся 3 выхода и нужны они для подключения моторов. Так как двигатели трехфазные, то нам необходимо просто подключить провода, не боясь что-то перепутать. Для изменения направления вращения двигателей достаточно поменять любые два провода местами.

Рисунок 19 – Сборка модели квадрокоптера
В самом центре должен находиться полетный контроллер. К нему должны подключаться GPS-компас, блок питания и светодиодный индикатор, с помощью которого полетный контроллер подключается к компьютеру.
На каждом луче имеются моторы, которые подключаются крегуляторам оборотов, а те в свою очередь подключаются к полетному контроллеру. Первый двигатель подключается к M1, второй к M2 и так далее. Все двигатели должны быть расположены в соответствии со схемой.
Следующим шагом было подключение полетного контроллера и радиоприемника. Каждый канал на приемнике подключается в соответствии с указаниями на полетном контролере. Названия каналов подписаны и на приемнике, и на «мозге». Остается только соединить их проводами. Теперь коротко о том, за что отвечает каждый канал:
Ail – элероны, с помощью которых управляется крен.
Ele – на самолетах это руль высоты, но на коптерах с его помощью управляется тангаж.
Thr – контроль оборотов вращения двигателей.
Rud – с помощью него осуществляется вращение коптера вокруг своей оси.
Aux – пятый канал необходимый для переключения между режимами GPS, гироскопами, и ручным управлением.
От каждого канала идет три провода, которые отвечают за:
Сигнал (цветной).
Минус (черный, либо коричневый).
Плюс (красный).
В конце работы, для мягкой посадки квадрокоптера, закрепляются посадочные шасси.
Дальше полетный контроллер подключается к компьютеру и настраивается. С помощью компьютера выбираем тип модели мультикоптера, калибруем гироскопы, акселерометры и радиоаппаратуру. Для стабильного полета, устанавливаем различные функции такие, как автоматическая посадка квадрокоптера при потере управлении радиосигнала (Failsafe), интеллектуальный контроль за ориентацией, автоматическая посадка при разряженном аккумуляторе.
После настройки устанавливаются винты в соответствии с направлением вращения моторов. На выходе мы получаем готовый квадрокоптер (рис. 18).
Для безопасности и удобства мы испытали квадрокоптер на стенде (рис.19).Только после устранения недочетов и ошибок, мы испытали его на улице.
Полет прошел успешно, все требования были выполнены.

Рисунок 20 – Испытания квадрокоптера
Для того, что бы управлять квадрокоптером вне зоны видимости я приобрел систему FPV, что означает First Person View (вид от первого лица).FPV в основном означает способ управление беспилотным аппаратом с помощью видео камеры на борту. Видео в реальном времени передается пилоту мультикоптера (дрона) на его монитор.Полет FPV - это более точный способ управления мультикоптером. Кроме того квадрокоптер сможет летать выше и значительно дальше, чем без FPV. Также FPV делает управление более реалистичным для оператора и позволяет лучше чувствовать оборудование, совершать более быстрый полет.
Заключение
В историко-исследовательской работе изучена история развития мультироторных систем, большую роль в которой сыграл изобретатель
Г. А. Ботезат, создавший в 1922 году квадрокоптер.
Дальнейшее развитие мультикоптеры получили в 21 веке не только как беспилотные летательные аппараты, но и как настоящие летательные аппараты, способные поднимать в воздух человека.
Мультироторы различаются количеством и расположением двигателей относительно центра аппарата, летают исключительно на электрической энергии, где на каждый винт есть собственный электродвигатель. Основными отличительными характеристиками мультекоптеров являются стабильность, надежность, безопасность, простота конструкции и управления.
В работе изучено устройство и принцип работы мультироторных систем, виды мультикоптерови основные конструктивные части, выявлены достоинства и недостатки разновидностей мультикоптеров.
Для понимания конструкции и принципа работы мультикоптера, мною собрана наглядная модель квадрокоптера, произведен выбор комплектующих деталей на основе технических характеристик.
Модель прошла успешное испытание на стабильность взлета, полета и посадки аппарата; дальность полета; автоматического возврата на взлетную точку при потере радиосигнала; автоматической посадки при уменьшении заряда аккумулятора ниже порогового значения; автоматическое реагирование аппарата на потерю ориентации.
Мультикоптеры как летательные аппараты находятся еще на начальной стадии развития, но я считаю, что будущее за мультироторными системами, которые могут быть использованы на благо человека во всех областях его деятельности.
Список источников
http://ru.wikipedia.org/wiki/Мультикоптер
http:// www.e-volo.com
https://futuraptor.com/gadgets/drones/chto-takoe-kvadrokopter
http://startapy.ru
http://www.joystick-pro.ru/multirotor_basic_concepts.php
|