Автор: Коновалов Максим Алексеевич
Возраст: 16 лет
Место учёбы: ГБОУ “Средняя школа №661”
Город, регион: Санкт-Петербург, Санкт-Петербург
Руководители: Тихомиров Михаил Евгеньевич, доцент кафедры эксплуатации и управления аэрокосмическими системами, Институт аэрокосмических приборов и систем ГУАП; Кожевникова Катерина Александровна, педагог дополнительного образования дворца творчества детей и молодежи “Молодежный творческий Форум Китеж Плюс”.
Робототехника в авиации
План работы:
Введение
1. Краткая история робототехники
1.1. История промышленных роботов
1.2. Роботы в космосе
2. Роботы в авиационной промышленности
2.1. Сдерживающий фактор внедрения робототехники в авиапроизводство
2.2. Использование роботов на современных авиационных заводах
3. Элементы робототехники и искусственного интеллекта в авиационной технике
3.1. Индикаторы на уровне лобового стекла. Нашлемная система индикации
3.2. Бортовая Активная Система Безопасности Полётов (БАСБП)
3.3. Автоматическое управление самолетом
3.4. Вычислительная система самолетовождения
3.5. Адаптивное вертолётное шасси
Заключение
Список литературы
Гипотеза: авиация в настоящем и будущем времени будет неразрывно связана с робототехникой ввиду конструктивного усложнения летательных аппаратов и их возможностей.
Цели работы: установить роль робототехнических устройств в авиации прошедшего и настоящего времени; доказать выдвинутую гипотезу.
Введение
Робот – автоматическое устройство, выполняющее ряд функций по заранее заложенной программе, призванное заменить человека при выполнении монотонных или опасных работ [1]. Изобретатели создавали роботов различной сложности ещё в древности, в том числе и в мифах: Гефест -- бог огня, искусный кузнец, создал себе механических служанок, всячески помогающих ему; Герон Александрийский во второй половине I века н.э. создавал и описывал автоматические двери, автоматы для продаж, механические кукольные театры и множество других, в том числе и не дошедших до нас в каком-либо виде, автоматонов [2].
В средние века было популярным создание различных часовых механизмов с подвижными фигурами и впервые задокументировано создание человекоподобных механических существ – андроидов.
XVIII век отмечается расцветом робототехники, вызванным стремительным развитием искусства часовщиков: мастерами созданы совершенно разные машины, хоть чаще всего и декоративно-демонстративного характера. К примеру, андроид-флейтист французского механика Жака Вокансона (1709-1789) умел исполнять 11 мелодий своими механическими пальцами.
1. Краткая история робототехники
1.1. История промышленных роботов
Автоматизация производства началась в 50-е годы XX века, когда Джордж Девол изобрел двухтонный робот-манипулятор, управляемый записанной на магнитном барабане программой. Система была названа Unimate. В 1961 году Девол получил патент [3], в 1962 создал в партнёрстве с Джозефом Энгельбергером компанию Unimation, и в том же году установил манипулятор на заводе General Motors на литейном участке. Система применялась для извлечения отлитых деталей из форм для отливки и использовала гидропривод, при этом имея 5 степеней свободы и очень высокую точность захвата – вплоть до 0,0001 дюйма. После выпуска ряда опытных образцов, компания в 1965 году создала стандартизированную серию роботов и продала множество произведенных машин в Европе.
В 1968 г. появляется первый промышленный робот, конструктивно сходный с рукой человека. В 1969 г. трудами ученых Стэнфордского исследовательского института создаётся машинное зрение, появляется возможность ориентирования с помощью сенсоров. На заводе Daimler Benz в 1971 г. установлена первая роботизированная сборочная линия с применением сварочных роботов компании KUKA. [4]
В 1975 г. рука робота впервые была использована в космической программе -- в зондах Viking 1 и Viking 2. Оба манипулятора разработаны фирмой Martin Marietta Astronautics г. Денвер, Колорадо. Зонды запущены с космодрома Кеннеди (20 августа и 9 сентября соответственно) на планету Марс для получения образцов грунта с целью поиска жизни. Устройства оказались успешными и являлись одним из первых проектов NASA с манипуляторами.
Хироши Макино из университета Яманаси, Япония, разработал SCARA (прим. перевод сокращения: рука робота избирательной податливости)-робота. Этот тип роботов являлся оптимальным решением для множества скоростных технологических задач с перемещением изделий. В 1982 году IBM представляет язык программирования AML для роботизированных систем. С помощью компьютера на основе системы от IBM можно печатать инструкции для манипулятора RS-1 [5]. В 1984 компания ADEPT inc. создаёт SCARA-робота AdeptOne с использованием электроприводов напрямую -- без механических передач. Эта конструкция упростила, уменьшила SCARA и следственно сделала ее надежнее, при этом не жертвуя скоростью системы.
1.2. Развитие космической робототехники
Луноход-1 – первый в мире дистанционно управляемый самоходный аппарат, успешно работавший на Луне. 17 ноября 1970 года он съехал на лунный грунт из станции “Луна-17”, прилунившейся в Море Дождей. Задачей аппарата было изучить поверхность спутника, радиоактивное и рентгеновское излучение на нем, его химический состав и грунт, а также отработать программу поиска района посадки лунной кабины (ЛК). Проработал до 14 сентября 1971 года, после чего связь с ним пропала.
На каждом из восьми колес имелись свои электродвигатель и тормоза, благодаря чему луноход мог дифференциальным способом огибать небольшие препятствия. Устройство было оборудовано солнечной батареей мощностью 180 Вт и буферными химическими батареями. Наблюдение осуществлялось с помощью двух телекамер малой частоты. Поддержание температуры осуществлялось с помощью радиоизотопного источника тепла ВЗ-Р70-4, работавшего на изотопе Полоний-210.
2003 год отмечает знаменательное событие в истории человечества -- запуск марсоходов Spirit и Curiosity 5 июня и 25 июня соответственно. Spirit прибыл на Марс 4 января 2004 года, Curiosity -- 25 января. Роверы были разработаны так, чтобы продержаться на поверхности планеты около 90 дней и при этом детально исследовать ее, но в итоге Spirit закончил свою миссию в 2011 году, Curiosity -- 13 февраля 2019 года.
Изначальными целями были:
- Поиск и описание горных пород и почв, потенциально свидетельствовавших о бывшей водной активности планеты.
- Поиск геологических причин формирования условий среды планеты и возможности существования жизни на ней.
- Классификация минералов и ландшафта.
И другое. Но в итоге, ввиду того что марсоходы пережили срок выполнения миссии, они собрали очень много дополнительной информации, в том числе панорамы, высококачественные снимки поверхности, и провели незапланированные научные исследования. [6]
2. Роботы в авиационной промышленности
2.1. Использование роботов на современных авиационных заводах
Современное применение возможностей робототехники на заводах пока еще ограничено. Можно выделить несколько основных направлений:
- Сварка – изготовление трубопроводов, лазерная сварка, сварка трением с перемешиванием.
- Сборка – клепание, сверление и позиционирование деталей.
- Контроль качества – проверка деталей на целостность с помощью лазерных, ультразвуковых и др. технологий.
- Производство с включением полимерно-композиционных материалов.
Внедрение и разработка робототехнических приспособлений на данный момент активно происходит на передовых производственных линиях различных корпораций: Boeing, ОАК (Объединенная Авиастроительная Корпорация), Airbus и других.
Например, ОАК начала использовать автоматическую линию сборки достаточно давно – в производстве фюзеляжа и планера Sukhoi Superjet 100 (прим. с 2004 г.), позднее – в проекте MC-21, где вдобавок автоматизированы сборка отсеков и клепка фюзеляжа. Выкладка композитного крыла MC-21, которую сделать вручную не представляется возможным, осуществляется с помощью робототехнических систем.
Роботы способны осуществлять контроль качества заготовки, например, инфузии и отверждения, проверять наличие полостей с помощью ультразвукового сканирования.
Улучшение робототехнических систем сводится к проработке комплексности, универсальности решений, то есть созданию манипуляторов со съемными насадками, чтобы, в случае необходимости перехода на новый технологический процесс, необходимую часть можно было установить без затруднений и продолжить производство.
Система FAUB [10]
Boeing разработала FAUB – Fuselage Automated Upright Build – систему, состоящую из колесных платформ с автоматическими манипуляторами на них, занимающуюся симметричным, автоматическим сверлением и клепанием установленных людьми крупных деталей фюзеляжа под надзором человека-оператора.
Два манипулятора: один снаружи фюзеляжа, другой внутри – работают симметрично в паре: первый просверливает отверстия и устанавливает заклепки, а второй их фиксирует.
Система прорабатывалась на протяжении шести лет. Она была установлена на заводе Эверетт с 2015 года, но, несмотря на затраты в миллионы долларов и постоянные улучшения, не оправдала себя и была устранена и заброшена в ноябре 2019 года.
Flex Track [10]
Flex Track – разработанный и производимый Boeing робот, представляющий из себя подвижную платформу с инструментами для сверления, передвигающуюся по двум установленным на поверхность (чаще всего, фюзеляж) металлическим трекам. Используется для ускорения и упрощения работы механиков, участвующих в процессе сборки фюзеляжа посредством замещения ручного процесса сверления отверстий (для заклепывания) автоматическим. Система быстро и просто устанавливается посредством закрепления треков с присосками простым прикладыванием к фюзеляжу, и так же просто перемещается в пространстве с помощью подъемного крана.
Преимуществами системы являются значительно повышенные точность и надежность сверления, разгрузка персонала и следственное повышение скорости производственного процесса.
Манипуляторы от фирмы Electroimpact [7]
Система AFP (Automated Fiber Placement), разработанная и построенная компанией Electroimpact, используется для формирования слоев углеволокна на сложных поверхностях (к примеру, на крыле самолета Boeing 777X) и отличается в первую очередь своими большими габаритами: установка высотой в 9 метров выкладывает углеволокно, формируя за один заход поверхность шириной в 760 см 1,7-тонной подвижной головкой, разматывающей волокно с 20 катушек с материалом.

Рисунок 2.2.1. Рабочая часть системы AFP

Рисунок 2.2.2. AFP покрывает фюзеляж полимером
Сменные насадки позволяют приспосабливать машину к разным задачам и заменяются всего за 30 секунд в автоматическом режиме. Машина снабжена системой лазерного автоматического контроля качества, которая регулирует расход материала и обращает внимание оператора на проблемы качества напечатанной поверхности в случае их возникновения. AFP дает более точный, качественный, в сравнении с человеком, результат, но уступает в скорости выполнения задачи.
AFP введена в эксплуатацию летом 2016 года. Система удешевила процесс производства крыльев и улучшила качество производимых деталей.
3. Элементы робототехники и искусственного интеллекта в информационно-управляющем поле в кабине самолета
Экипаж самолета располагается в кабине, которая оборудована информационно-управляющим полем (ИУП) для работы людей. В состав ИУП входят приборные доски с указателями отдельных параметров, органы управления полетом (ручки управления или штурвалы, педали, рукоятки управления двигателями), пульты управления бортовыми системами и другое.
3.1. Индикаторы на уровне лобового стекла. Нашлемная система индикации
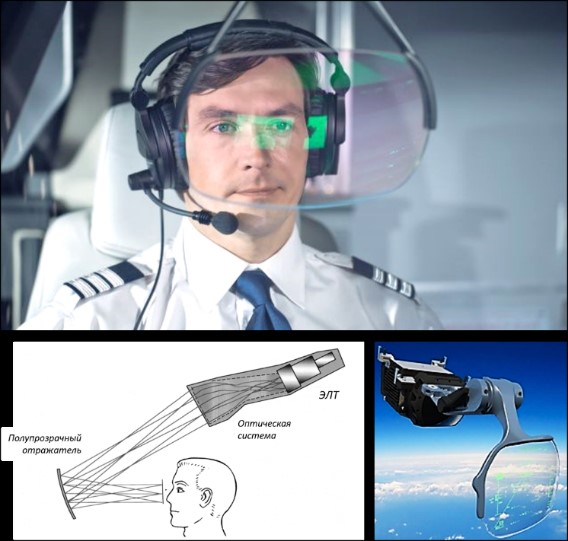
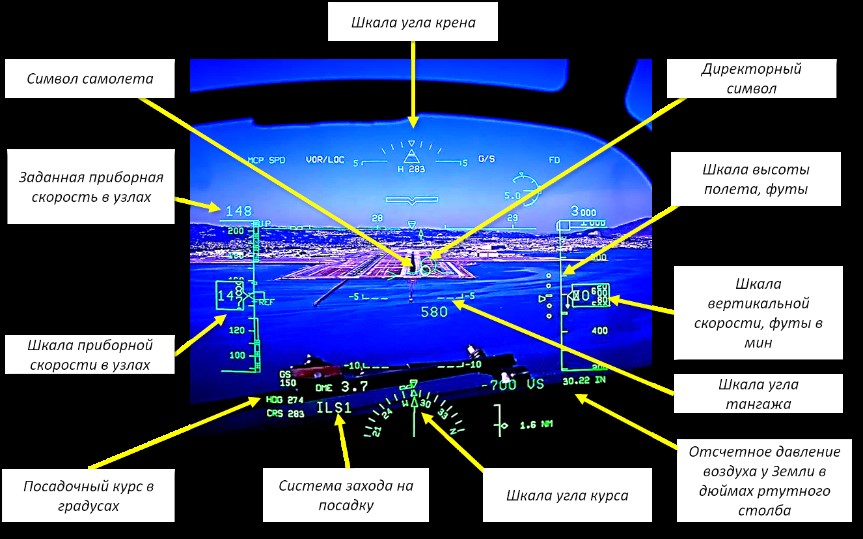
К естественному языку общения можно отнести удобное для пилотирования летательного аппарата отображения информации. На рабочих местах пилотов размещаются электронные индикаторы (дисплеи) прямого видения. Сравнительно новым средством отображения информации являются коллиматорные индикаторы на уровне лобового стекла (ИЛС). На полупрозрачных стеклах (комбайнерах) этих индикаторов отображаются не только параметры полета, которые накладываются на видимую летчиком внешнюю обстановку, но и изображение так называемого синтезированного (искусственного) видения. Последнее наиболее важно при полете в условиях ограниченной видимости, когда летчику из кабины из-за тумана, дождя, снега и других ограничивающих факторов не видны наземные ориентиры. Устройство ИЛС и отображаемая на нем информация показаны на рисунке 3.1.1.
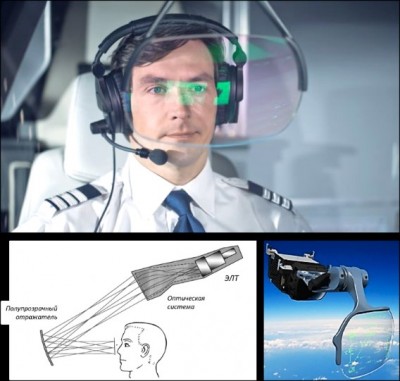 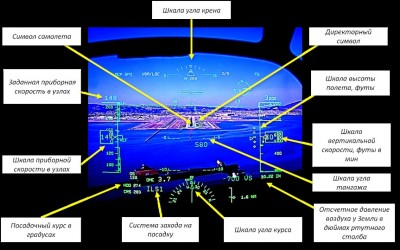
Рисунок 3.1.1 - Устройство ИЛС и отображаемая на нем информация
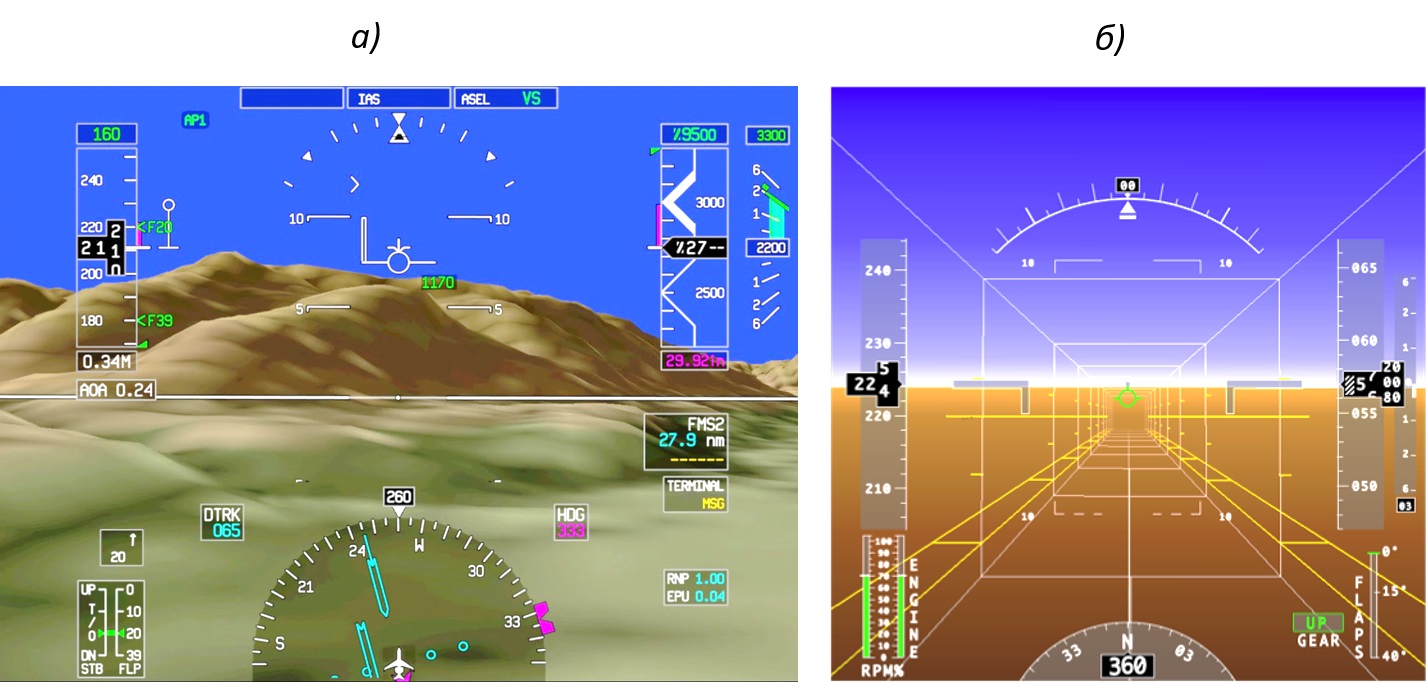
Отображение синтезированной внешней обстановки и предлагаемая летчику траектория полета («дорога в небе») представлены на рисунке 3.1.2.

Рисунок 3.1.2 - Отображение синтезированной внешней обстановки
и предлагаемая летчику траектория полета («дорога в небе»)
Коллиматорный индикатор современных воздушных судов обычно закрепляется на потолке кабины, а на маневренных самолетах в одноместной кабине – перед глазами летчика над приборной доской (рисунок 3.1.1). Однако в быстротечном маневренном воздушном бою летчик должен оперативно наводить головки самонаведения ракет на воздушную цель. Для этого, начиная с 1980-х годов развиваются нашлемные системы целеуказания и индикации (рисунок 3.1.3).

Рисунок 3.1.3 - Нашлемная система целеуказания и индикации
Кроме показанных на рисунке 3.1.3 навесных на защитный шлем (ЗШ-7А) летчика устройств измерения угла поворота головы летчика в горизонтальной и вертикальной плоскостях и комбайнера визирования цели одним глазом существуют специальные конструкции ЗШ, в которых летчик видит цели двумя глазами (рисунок 3.1.4).

Рисунок 3.1.4. ЗШ с проекцией на оба глаза
Нашлемная система индикации (НСИ) проецирует изображение на прозрачный экран, находящийся перед глазами пилота, и тем самым выводит на него любую информацию. Текущая область применения НСИ пока ограничена военной авиационной техникой, поэтому ее основными задачами являются:
- Обеспечение возможности одновременного слежения за целью и наблюдения за показаниями приборов.
- Возможность с помощью Системы управления вооружением (СУВ) наведения бортового вооружения направленного действия (пушки на боевом вертолете) и головки самонаведения ракеты (на истребителе) на цели без изменения курсового угла самолета.
- Целеуказание. Наведение взгляда пилота и, соответственно, вооружения, на цель с помощью подсказок, сформированных с помощью данных прицельно-навигационного комплекса.
- Искусственное зрение. Возможность интеграции возможностей систем визуального наблюдения (например, ИК-камер) в зрение пилота. Таким образом, появляются возможности: создание отчетливой трехмерной карты местности для улучшения навигации на малых высотах; наблюдение сквозь элементы самолета; наблюдение удаленных целей.
Несмотря на многочисленные преимущества системы, нельзя игнорировать и ее существенные недостатки:
- Дополнительная масса и смещенный центр тяжести головы вызывают более быстрое утомление пилота;
- При вибрациях с частотой менее 10 Гц, нередко встречающихся в авиатехнике, и в особенности на вертолетах, возникают затруднения со считыванием информации с дисплея, скорость реакции может ухудшиться вплоть до ее возрастания в 10 раз;
- Поверхность стекла комбайнера ИЛС может быть несколько шероховатой, поэтому цели на больших расстояниях могут быть размытыми, и общая видимость ухудшена.
3.2. Активные системы обеспечения безопасности полета. Бортовая активная система безопасности полета
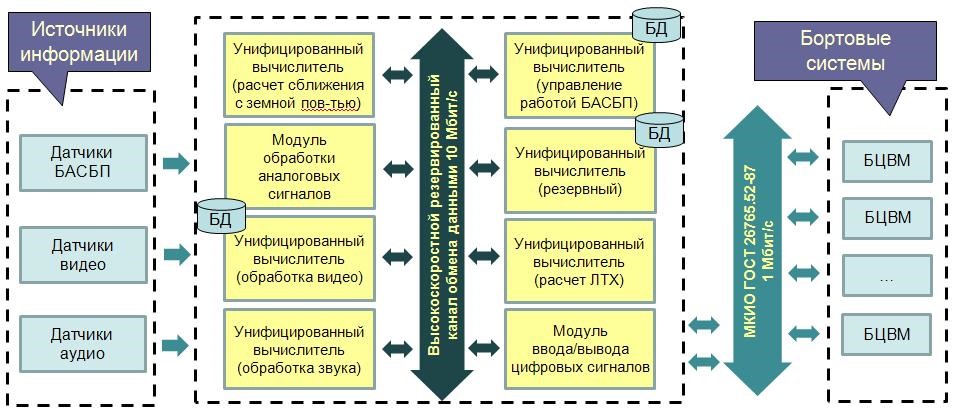
Бортовая активная система безопасности полетов (БАСБП) – разработка корпорации “Русские Системы”, предназначенная для повышения безопасности тренировочных и боевых полетов за счет контроля и поддерживания работоспособного состояния экипажа, информирования экипажа о развивающейся опасной ситуации и необходимости принятия мер по ее разрешению с помощью подключения к контуру управления ЛА.
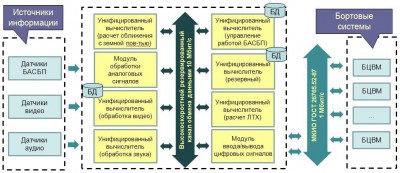
Рисунок 3.2.1 – Функциональная схема БАСБП
Оценка работоспособности пилота осуществляется путем автоматической обработки информации, включающей в себя:
- Обжатие ручки управления
- Легочные паузы
- Интенсивность дыхания
- Положение головы
- Схему управления самолетом
- Реакцию на интеллектуальные подсказки и речевые оповещения
Анализ вышеприведенных признаков сознательности позволяет системе установить точное состояние экипажа в данный момент.
Поддержка сознательности пилота осуществляется с помощью:
- Интеллектуальных подсказок
- Речевых оповещений
- Автоматического включения подачи кислорода
- Вибрации камер противоперегрузочного костюма
- Повышения давления в противоперегрузочном костюме
При потере летчиком сознания, система автоматически переводит ЛА в режим автоматического управления до восстановления нормальной деятельности пилота.
БАСБП не только устраняет последствия избыточной перегрузки, но и предупреждает саму возможность перегрузки с благодаря выдаче пилоту адаптивной информации (интеллектуальных подсказок) на тему:
- Применения противоперегрузочных приемов
- Безопасности маневрирования
- Опасной приближенности ЛА к поверхности
- Летно-технических характеристик
- Применения систем жизнеобеспечения
БАСБП снимает показания датчиков ЛА в реальном времени и обрабатывает их на нескольких уровнях, при этом может автоматически принимать решения и отправлять информацию в сеть БРЭО (бортового радиоэлектронного оборудования) ЛА или по радиоканалу. Благодаря обилию аудио-, видео- и аналоговых входов и выходов, система универсальна и может быть подстроена под любые выполняемые аппаратом задачи.
Датчики, составляющие БАСБП (датчики усилия на РУС и педалях, давления в противоперегрузочных устройствах, приемники и пр.), никак не мешают управлению ЛА. Комплекс унифицирован, поэтому может применяться на типах МиГ-29, Су-27, Су-30, Як-130 и др.
3.3. Автоматическое управление самолетом
Первым в истории автопилотом являлся автопилот, предложенный в 1890-х годах великим русским ученым Константином Эдуардовичем Циолковским для оснащения дирижабля.
Первый практически построенный автопилот был разработан американской фирмой Sperry Corporation в 1912 году. Он обеспечивал автоматическое удержание курса полёта и стабилизацию крена с помощью подключенных к управляющим поверхностям гидравлических приводов, управляемых показаниями бортовых гирокомпаса и барометрического высотомера.
С начала 1930–х годов автопилоты начали разрабатываться в Особом конструкторском бюро в Ленинграде. Результатом этих работ стало создание так называемых беспилотных телемеханических самолетов на базе самолетов различных типов (от легких Р-1, У-2, Р-5, до тяжелых ТБ-1 и ТБ-3). На Комендантском аэродроме Ленинграда в 1938 – 1940 годах такие самолеты выполняли автоматический взлет, полет по заданному маршруту и автоматическую посадку на аэродром.
С 1930х, автопилоты устанавливались уже на пассажирские лайнеры, а в период Второй Мировой Войны повышенные требования к точности автопилотов привели к их совершенствованию. В 1947 году самолёт C-54 ВВС США совершил трансатлантический перелёт (со взлетом и посадкой) под управлением автопилота[8] [9].

Рисунок 3.3.1. “Пилотируемый роботом самолёт безопасно пересекает Атлантический океан”
В современной авиации автопилот стал настолько совершенным, что способен устранять большую часть возникающих в полёте опасностей, в т.ч. полет со скольжением, учет угла сноса при боковом ветре и даже вывод самолета из штопора. Современные автопилоты (системы автоматического управления - САУ) выполняют многочисленные другие функции.
3.4. Вычислительная система самолётовождения
Среди бортовых систем воздушных судов важное значение имеют навигационные комплексы. Современные навигационные комплексы строятся на базе бортовых цифровых вычислительных машин.
Центральное место в задачах пилотирования и навигации занимает функционирование бортового комплекса навигации и самолетовождения - вычислительной навигационной системы (ВСС).
Вычислительная система самолетовождения (ВСС) - Flight Management system (FMS) объединяет в одном комплексе все системы пилотажно-навигационного комплекса (ПНК). Специалисты в области авиационного приборостроения имеют непосредственное отношение к созданию ВСС. Особое внимание они уделяют принципам системной организации этих измерительно-вычислительных комплексов, к разработке алгоритмического и программного обеспечения.

Рисунок 3.4.1 – Элементы Вычислительной системы самолетовождения пассажирского самолета
Вычислительная система самолетовождения (ВСС) предназначена для выполнения следующих задач:
- Формирование и отображение летному экипажу информационных и управляющих сигналов, необходимых для четырехмерной зональной навигации, во всех широтах, днем и ночью, в простых и сложных метеоусловиях, с оптимизацией режимов полета по отечественным и зарубежным авиатрассам с выполнением действующих и перспективных норм самолетовождения по данным автономных и неавтономных средств навигации;
- Оперативное управление программой полета;
- Централизованное управление радиосвязным оборудованием (РСО), бортовой системой технического обслуживания (БСТО) и системами радиотехнического оборудования навигации и посадки (РТО НП) в автоматическом и ручном режимах, с обеспечением необходимых приоритетов и индикации заданных значений радиочастот по плану полета, частотно-кодовых каналов и режимов работы;
- Автоматизированный наземный и автоматический полетный контроль собственной работоспособности ВСС, а также контроль линий связи и информации взаимодействующих систем, с выдачей исходной информации на многофункциональный пульт управления (МФПУ);
- Ввод, хранение аэронавигационной информации и выдача информации из нее для индикации на комплексную систему электронной индикации и сигнализации (КСЭИС).
ВСС предусматривает автоматическое планирование маршрута полета (горизонтальная навигация) и профиля полета (вертикальная навигация). Алгоритмы вычислений, выполняемых в ВСС, позволяют оптимизировать режимы полета (высоты и скорости полета) по критериям минимума расхода топлива, минимума времени полета, минимума стоимости полета.
Учитывая уровень совершенства ВСС, можно утверждать, что она по праву может считаться системой искусственного интеллекта, имеющей непосредственное отношение к робототехнике.
3.5. Адаптивное вертолётное шасси
Посадка вертолета на неровную поверхность, например, в горах, на палубу при качке корабля, является сложной проблемой авиастроителей. Технологии робототехники сделали это возможным, используя адаптивные стойки шасси, например, в США (рисунок 3.5.1).
 
Рисунок 3.5.1 – демонстрация работы DARPA
В рамках программы ATHLAS (All Terrain Helicopter Landing System) – разрабатывающиеся студентами швейцарской высшей технической школы Зюри вертолётные шасси, способные адаптироваться к неровностям поверхности с помощью четырёх автоматически управляемых конечностей. Шасси полностью автономны во время процедуры посадки и не требуют дополнительного внимания экипажа.
ATHLAS – модульная система, поэтому в ней предусмотрена возможность замены наконечников шасси на специализированные (лыжи, колёса и пр.).
Адаптация к поверхности происходит следующим образом: обратный индуктивный ток, возникающий в электродвигателе при возникновении сопротивления, позволяет определить контакт с поверхностью. После этого, система ждёт касания поверхности всеми конечностями, при этом позволяя каждой ноге свободно двигаться только вверх. Когда все конечности контактируют с землёй, система окончательно выравнивает вертолёт и включает тормоза. Эффективная работа достигается при посадке под углом не более чем 25° к поверхности. Тестирование показало, что ротор после выравнивания всегда накренён не более чем на 5°.
ATHLAS позволит вертолётным экипажам, работающим в областях с поверхностью, непригодной для посадки с обычными шасси, осуществлять безопасное и удобное приземление, при этом не отвлекая пилота от процесса посадки вертолёта. Это особо востребовано службами спасения, работающими в горах, где нередко требуется посадить вертолёт на пологий склон.
Заключение
Авиация немыслима без робототехники. Роботы участвуют практически в каждой области авиации: от производства аппарата до управления им и иногда даже превосходят людей в выполнении этих задач. Без внедрения роботов в промышленность производство самолётов, например, из композитных материалов, было бы невозможным или чрезвычайно медленным и ресурсозатратным; без автопилота безопасность современных рейсов была бы несравнимо ниже чем есть сейчас; профессия пилота стала бы ещё сложнее чем она есть, поэтому максимальные размеры самолётов бы резко ограничились.
Боевое применение роботов неограниченно и уже чрезвычайно велико: системы прицеливания, спасения жизни потерявшему сознание экипажу, аугментированного зрения и многие другие протестированы и активно применяются сейчас, расширяя время и область применения, улучшая эффективность военной авиатехники в разы.
Источники
- http://www.servomh.ru/stati/robototehnika-istoriya-osnovnye-zadachi-robototehniki
- https://cyberleninka.ru/article/n/robototehnicheskie-kompleksy-voennogo-naznacheniya-sovremennoe-sostoyanie-i-perspektivy-razvitiya/viewer
- http://robotrends.ru/pub/1847/konspekty-opyt-primeneniya-robototehnicheskih-sistem-v-samoletostroenii
- Боднер В. А. Теория автоматического управления полётом, М., 1964
- "Automated Flight Controls" (PDF). faa.gov. Federal Aviation Administration.
- https://ifr.org/robot-history
- Robot Evolution: The Development of Anthrobotics. Mark E. Rosheim
- http://window.edu.ru/resource/082/59082/files/bis-7.pdf
- Boeing.com
- ru.wikipedia.org
- Wikipedia.org
- Справочник по авиационному оборудованию (АиРЭО)
- Лунные зонды СССР
Примечания
[1] Научно-технический словарь; Большой толковый словарь русского языка Кузнецова
[2] Roman Glory. Древние открытия: Удивительные машины (1 июня 2014 г.).
[3] Патент США 2988237, 1961, с приоритетом от 1954.
[4] Kuka открывает путь роботам. Оф. сайт KUKA kuka.com , "История".
[5] Оф. сайт компании IBM https://www.ibm.com/ibm/history/exhibits/robotics/robotics_5.html
[6] Оф. сайт марсоходной миссии NASA mars.nasa.gov, секция Mission.
[7] https://www.electroimpact.com/products/composites/overview.aspx -- оф. сайт фирмы Electroimpact
[8] Stevens, Brian; Lewis, Frank (1992). Aircraft Control and Simulation. New York: Wiley. ISBN 978-0-471-61397-8.
[9] http://www.rarenewspapers.com/view/623884 -- газета, заголовок статьи которой гласит о первом автоматическом полёте через океан
[10] Оф. сайт Boeing corp. boeing.com
|