Создание и развитие авиационных двигателей с управляемым вектором тяги
Автор: Прохоров Кирилл Михайлович
Возраст: 18 лет
Место учебы: МБУДО Нововоронежский ДДТ
Город, регион: г. Нововоронеж, Воронежская область
Руководитель: Михайлов Алексей Николаевич, педагог дополнительного образования.
Создание и развитие авиационных двигателей с управляемым вектором тяги
План историко-исследовательской работы:
Введение
Цель работы
Самолеты с вертикальным взлетом и посадкой
История разработка отечественных двигателей с управляемым вектором тяги для расширения манёвренных характеристик
Применение управляемого вектора тяги на современных самолетах
Создание действующего макета двигателя с управляемым вектором тяги
Влияния управляемого вектора тяги на летно-технические характеристики самолета
Заключение
Используемые источники информации.
Введение
Современные боевые самолеты отличаются высокими маневренными характеристиками. Для этого необходимо, чтобы самолет имел не только высокую тяговооруженность, но и мог выполнять пилотаж с большими углами атаки на малых скоростях полёта. Снижение скорости полета приводит к снижению эффективности управляющих аэродинамических поверхностей. Выполнение высокоэффективных фигур в воздушном бою возможно лишь на основе широкой автоматизации управления самолёта с использованием управляемого вектора тяги (УВТ) — функции сопла, изменяющей направление истечения реактивной струи.
Цель работы
Целью моей работы является исследование истории создания авиационных двигателей с управляемым вектором тяги, их развития и влияния на летно-технические характеристики боевых самолетов.
Для достижения цели были поставлены следующие задачи:
Ознакомиться с историей возникновения двигателей с управляемым вектором тяги;
Изучить историю разработки отечественных двигателей с управляемым вектором тяги;
Рассмотреть применение УВТ на современных боевых самолетах;
Собрать макет УВТ и провести его тестирование;
Выяснить влияние УВТ на манёвренность самолета.
1. Самолеты с вертикальным взлетом и посадкой
Первые опыты, связанные с практической реализацией управляемого вектора тяги на самолётах, относятся к 1957 году и проводились в Великобритании в рамках программы по созданию боевого самолета с вертикальным взлетом и посадкой (СВВП). Прототип под обозначением Р.1127 был оснащён двумя поворачивающимися на 90° соплами, расположенными по бокам самолёта на линии центра тяжести, которые обеспечивали движение в вертикальном, переходном и горизонтальном режимах полёта. Первый полёт Р.1127 состоялся в 1960 году, а в 1967 году на его базе был создан первый серийный СВВП «Харриер».
Существенным шагом вперёд в разработке двигателей с изменяемым вектором тяги в рамках программ СВВП стало создание в 1987 советского сверхзвукового СВВП Як-141. Принципиальной отличительной чертой данного самолёта стало наличие трёх двигателей: двух подъёмных и одного подъёмно-маршевого с поворотным соплом, расположенным между хвостовыми балками. Трехсекционная конструкция сопла подъёмно-маршевого двигателя делала возможным поворот вниз от горизонтального положения на 95°.
Испытание самолетов с вертикальным взлетом и посадкой показали, что, управляя вектором тяги в полете (а не только на взлете, посадке и при выполнении зависания), можно получить определенные тактические преимущества перед самолетами противника в воздушном бою. Это послужило в середине 80-х гг. толчком к развитию идеи управления вектором тяги на маневренных истребителях четвертого и пятого поколений, для которых введение новых схем управления самолетом могло дать важные преимущества в процессе ведения ближнего воздушного боя.
2. История разработка отечественных двигателей с управляемым вектором тяги для расширения манёвренных характеристик
В Советском Союзе практические работы по управлению вектором тяги двигателей для перспективных истребителей и расширения маневренных возможностей самолетов четвертого поколения начались во второй половине 80-х гг. В рамках создания в НПО «Сатурн» им. A.M. Люльки двухконтурного турбореактивного двигателя с форсажной камерой (ТРДДФ) пятого поколения АЛ-41Ф для многофункционального истребителя ОКБ им. А.И. Микояна (МФИ, проект «1.42») было разработано плоское сопло, предусматривавшее возможность отклонения вектора тяги.
Аналогичные двигатели рассматривались и для проекта перспективного истребителя «ОКБ Сухого» с крылом обратной стреловидности С-32 (позднее получил обозначение Су-47 «Беркут»). Однако в дальнейшем от идеи применения плоского сопла в конструкции АЛ-41Ф отказались, перейдя к традиционному осесимметричному выходному устройству. Недостатки плоского сопла заключаться в потери тяги, значительном утяжеление конструкции двигателя и отсутствии всеракурсности. Изменено может быть, положение только горизонтальных створок сопла и, соответственно, направление вектора тяги может меняться только в вертикальной плоскости.
Экспериментальное плоское сопло было изготовлено в НПО «Мотор» и установлено на левый двигатель АЛ-31Ф летающей лаборатории ЛЛ-УВ(ПС), созданной в 1990 г. на базе самолета Су-27УБ. Применение такого сопла способствовало значительному снижению уровня инфракрасной заметности летательного аппарата - параметра, которому придавалось большое значение при разработке перспективных боевых самолетов пятого поколения. Недостаточное финансирование не позволило провести на этом самолете полный цикл летных испытаний по отработке УВТ и реверса.
Но к этому времени в СССР уже были получены первые практические результаты по управлению вектором тяги посредством отклонения в вертикальной плоскости обычного осесимметричного сопла двигателя АЛ-31Ф, применяемого на всех истребителях семейства Су-27. С учетом проблем, с которыми пришлось столкнуться при разработке плоского сопла, именно такое направление было признано более целесообразным.
Серийный двигатель АЛ-31Ф с первым экспериментальным вариантом одношарнирного осесимметричного поворотного сопла и питанием приводной части системы его управления от гидравлической системы самолета был установлен в 1989 г. на самолет Т10-26 (Су-27 №07-02). Поворотным являлось все сопло двигателя и обеспечивало отклонение вектора тяги в вертикальной плоскости в диапазоне углов ±15°. В первый полет его поднял 21 марта 1989 г. летчик-испытатель Олег Цой. В испытаниях этой летающей лаборатории, называвшейся ЛЛ-УВ(КС), принимал участие также Виктор Пугачев.
Модификацией Су-27М стал опытный самолет Т10М-11 (№711), известный под названием Су-37. В 1995 г. его оснастили опытными двигателями АЛ-31Ф с поворотными в вертикальной плоскости соплами и модифицированной системой дистанционного управления СДУ-10МБР разработки МНПК «Авионика», обеспечивающей управление самолетом за счет управления вектором тяги двигателей. Это позволило обеспечить управляемость самолета на сверхбольших углах атаки и скоростях полета, близких к нулевым.
Первый вылет на самолете Т10М-11 с УВТ и новой системой управления выполнил 2 апреля 1996 г. летчик-испытатель «ОКБ Сухого» Евгений Фролов, осуществивший затем весь цикл испытаний этой машины. В ходе первых же полетов Фролов приступил к отработке на Су-37 новых фигур пилотажа: переворотам в вертикальной плоскости без изменения траектории поступательного полета («чакра Фролова»), форсированным разворотам с минимальными радиусами, «управляемому штопору». Реализация режимов сверхманевренности, обеспечивала истребителю Су-37 безусловное превосходство в ближнем бою над противником, не обладающим такими возможностями.
Конструктивно управление вектором тяги каждого двигателя самолета Су-37 было реализовано в виде поворотного осесимметричного сопла, закрепленного на кольцевом поворотном устройстве и отклоняемого в вертикальной плоскости двумя парами гидроцилиндров в диапазоне углов ±15°. В качестве рабочего тела системы поворота сопел на Су-37 применялась гидросмесь от бортовой гидравлической системы самолета.
Программа испытаний самолета Су-37 с двигателями АЛ-31Ф с УВТ завершилась в 2000 г.
Развитием двигателя АЛ-31Ф с поворотным осесимметричным соплом, отработанного на Су-37, стал серийный ТРДДФ АЛ-31ФП для сверхманевренного многофункционального истребителя Су-30МКИ, разработанного по заказу ВВС Индии.
Первый опытный самолет Су-30МКИ с двумя двигателями АЛ-31ФП с УВТ совершил первый полет 1 июля 1997 г., его испытания проводил летчик-испытатель «ОКБ Сухого» Вячеслав Аверьянов.
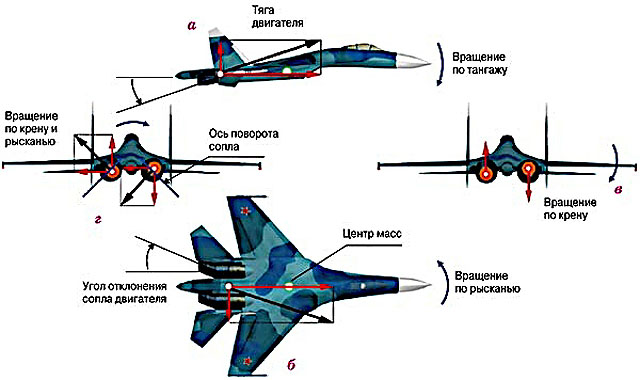
Как и опытные АЛ-31Ф с УВТ, применявшиеся на самолете Су-37, двигатель АЛ-31ФП оснащен поворотным в пределах ±15° соплом. Однако в отличие от предшественника ось поворота сопла отклонена от продольной плоскости симметрии на 32°, что позволяет иметь еще и боковую составляющую тяги и реализовать управляемость по всем трем осям (тангаж, крен и рыскание). В сочетании с возможностью автоматического дифференциального изменения тяги двух двигателей (так называемое управление «разнотягом») это обеспечивает управление самолетом во всех плоскостях на сверхмалых и околонулевых скоростях полета, когда обычные аэродинамические органы управления теряют свою эффективность.
Система управления вектором тяги на Су-30МКИ включена в систему дистанционного управления самолетом и не имеет каких бы то ни было отдельных рычагов управления.
Управление вектором тяги, прогрессивная аэродинамическая компоновка и эффективная система управления обеспечили Су-30МКИ поистине уникальные маневренные возможности. Летчик-испытатель Вячеслав Аверьянов освоил на этом самолете пилотажный комплекс, который в то время не был доступен ни одному другому боевому самолету в мире, и с 1998 г. с блеском демонстрирует его на различных авиационных выставках в России и за рубежом.
В 2003 г. комплектом двигателей АЛ-31Ф серии 3 с поворотными соплами (аналогичными применяемым на АЛ-31ФП) был оснащен опытный корабельный учебно-боевой и многофункциональный самолет Су-27КУБ. Применение УВТ повысило маневренные и взлетно-посадочные характеристики этого самолета корабельного базирования, что было подтверждено испытаниями Су-27КУБ на ТАВКР «Адмирал Кузнецов» в Баренцевом море в ноябре 2004 г.
Альтернативная конструкция системы УВТ разработана на санкт-петербургском «Заводе им. В.Я. Климова», как дальнейшее развитие двигателей семейства РД-33 для истребителей класса МиГ-29. На РСК «МиГ» и «Заводе им. В.Я. Климова» предпочитают использовать термин отклоняемый вектор тяги (ОВТ), что подчеркивает отличие их системы от применяемых на самолетах «Сухого» двигателей с УВТ. На модифицированном РД-33 был реализован поворот не всего осесимметричного сопла, как на двигателе АЛ-31ФП, а только его сверхзвуковой части. Это позволяло уменьшить массу конструкции, сделать ее достаточно простой и технологичной, повысить быстродействие механизма перекладки сопла, а главное - обеспечить возможность всеракурсного отклонения вектора тяги в любом направлении. Величина угла отклонения вектора тяги достигала 16° в каждую сторону, а скорость перекладки сопла - 60°/с.
В отличие от двигателя АЛ-31ФП, где сопло поворачивается на шаровом шарнире, в результате чего плечо приложения силы отстоит от среза сопла на достаточно большое (более метра) расстояние, РД-33 управляет вектором тяги путем отклонения на заданный угол створок многорежимного сопла (в данной схеме плечо приложения силы конструктивно гораздо меньше и соответственно эффективность отклонения ВТ выше).
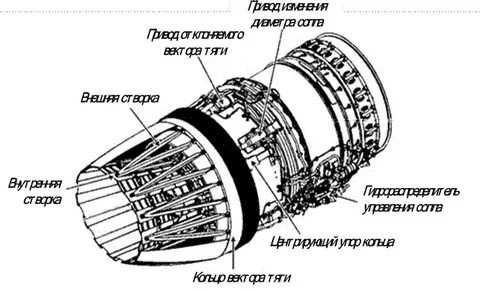
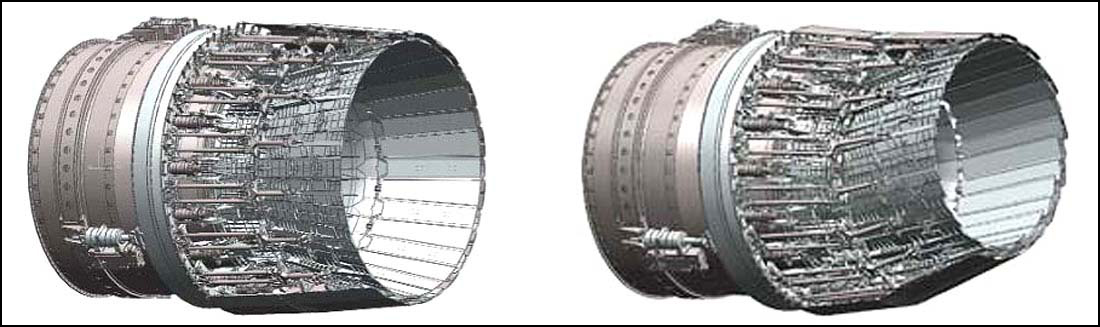
Конструктивная схема сопла предусматривает одновременный поворот всех сверхзвуковых створок на заданный угол за счет воздействия на них через тяги одного общего управляющего кольца, приводимого в движение тремя гидроприводами, которые в свою очередь прикреплены к неподвижному силовому поясу на форсажной камере. Положение концов штоков гидроприводов в трех точках однозначно определяет положение управляющего кольца в пространстве и, соответственно, направление вектора тяги.
В 2001 г. два двигателя с ОВТ были установлены на опытный самолет МиГ-29М №156, участвовавший до 1993 г. в летных испытаниях по программе МиГ-29М (типа «9-15»). В августе 2003 г. летчик-испытатель РСК «МиГ» Павел Власов выполнил на нем первый полет с отклонением вектора тяги. К началу августа 2005 г. на летающей лаборатории МиГ-29ОВТ №156 летчиками РСК «МиГ» Павлом Власовым и Михаилом Беляевым выполнено уже более 50 полетов с отклонением вектора тяги, отработана как сама система ОВТ и управления ей, так и ее связь с системой дистанционного управления самолетом
Применение всеракурсного ОВТ сделало управление МиГ-29М/М2 более точным, более уверенным и более энергичным, практически не зависимым от величины угла атаки, причем как при выполнении элементов сверхманевренности, так и при традиционном пилотировании. Это не только дает МиГ-29М/М2 дополнительные серьезные преимущества в воздушном бою, но и существенно снижает нагрузку летчика, позволяя ему больше внимания уделять непосредственно решению боевых задач. Полет с применением ОВТ на самолете типа МиГ-29М демонстрировался на МАКС-2005.
3. Применение управляемого вектора тяги на современных самолетах
В настоящее время система отклонения вектора тяги рассматривается как один из обязательных элементов современного боевого самолёта в связи со значительным улучшением лётных и боевых качеств, обусловленным её применением. Также активно изучаются вопросы модернизации имеющегося парка боевых самолётов, не имеющих ОВТ, путём замены двигателей или установки блоков ОВТ на штатные двигатели. Так, разработанная на «Заводе им. В.Я. Климова» конструкцию сопла с всеракурсным отклонением его сверхзвуковой части можно не только применять на ТРДДФ типа РД-33, но и адаптировать к двигателям других типов, в том числе зарубежного производства. Технология создания унифицированной системы ОВТ получила название КЛИВТ - «Климовский вектор тяги».
Современные боевые самолёты с управляемым вектором тяги:
F-22 «Раптор» (США)
Многоцелевой истребитель пятого поколения, разработанный компаниями Lockheed Martin, Boeing и General Dynamics. Оснащён двумя ТРДДФ с управляемым в вертикальной плоскости вектором тяги. Сопла двигателей имеют плоскую форму, снижающую заметность самолёта в инфракрасном диапазоне, но не позволяющую получить всеракурсное отклонение ОВТ.
Миг-35
Российский многофункциональный лёгкий истребитель поколения «4++», характеристики которого максимально приближены к пятому поколению. Является развитием МиГ-29М/М2 и оснащается двигателями РД-33МК со всеракурсным управлением вектором тяги.
Су-35С
Российский многоцелевой сверхманёвренный истребитель с управляемым вектором тяги поколения «4++». Разработан в ОКБ Сухого в 2008 году и является одним из основных истребителей ВВС России, а также своего рода переходным звеном между истребителями Су-27 и Су-57. На Су-35С установлены два двухконтурных турбореактивных двигателя АЛ-41Ф-1С разработки ОКБ им. А. Люльки с всеракурсным управлением вектором тяги: ±16° в любом направлении, ±20° в плоскости крыла
Су-57
Российский многофункциональный истребитель пятого поколения, созданный ОКБ имени П. О. Сухого в рамках комплексной целевой программы «ПАК ФА». Установлены двигатели первого этапа — АЛ-41Ф1 с всеракурсным управлением вектором тяги. От двигателя для Су-35С его отличает повышенная сила тяги, сложная система автоматизации, полностью цифровая система управления, новая турбина и улучшенные расходные характеристики. На данный момент разрабатывается двигатель второго этапа под обозначением «тип 30».
4. Создание действующего макета двигателя с управляемым вектором тяги
Изучением управляемого вектора тяги я занимался два года на кружке авиамоделирования. В программе трехмерного моделирования Компас-3Д мной были спроектированы два механизма всеракурсного вектора тяги для импеллера - авиамодельного двигателя, создающего реактивную тягу. Затем УВТ были изготовлены с помощью 3Д печати.
Первый вариант УВТ оснащен одношарнирным осесимметричным поворотным соплом. Управление поворотом сопла осуществляется за счет двух авиамодельных сервоприводов.
Для изучения влияния УВТ на маневренность была собрана контурная радиоуправляемая авиамодель самолета Су-37 из подложки для ламинированных полов. Было произведено несколько запусков авиамодели. Полет осуществлялся как с одновременным управлением аэродинамическими поверхностями и вектором тяги, так и с выключенным УВТ. Испытания показали, что на малых скоростях из-за отсутствия обдува (это обусловлено использованием импеллера, а не воздушного винта) модель становиться неуправляемой без УВТ. Использование управляемого вектора тяги показал значительный прирост маневренности как в горизонтальном полете, так и при выполнении пилотажных фигур, например кобры Пугачева.
Во втором варианте управление вектором тяги осуществляется путем отклонения на заданный угол створок сопла. Это позволяет не только управлять вектором тяги, но и изменять площадь сечения сопла. Для управления таким механизмом требуется 4 сервопривода.
5. Влияния управляемого вектора тяги на летно-технические характеристики самолета
Применение всеракурсного отклонения вектора тяги позволяет осуществлять не только управление истребителем на маневре (в т.ч. на режимах сверхманевренности - на очень больших углах атаки и минимальных скоростях), но и стабилизацию параметров полета по всем трем осям при обычном пилотировании, обеспечивая сокращение затрат на балансировку и, соответственно, расхода топлива. Пространственное ОВТ дает возможность получать большие угловые скорости крена и обеспечивать эффективное управление по курсу при полете на больших углах атаки, когда традиционные аэродинамические органы управления значительно утрачивают свою эффективность, а также существенно увеличивать угловые скорости по тангажу. Уменьшение длины разбега и пробега облегчает эксплуатацию с коротких ВПП, поврежденных в ходе боевых действий, полевых аэродромов или авианосцев.
Например, благодаря использованию УВТ Су-30МКИ может выполнять в бою маневр «J-turn» (поворот J) для энергичного разворота на 180° в ограниченном пространстве. Название маневр получил из-за сходства траектории с латинской прописной буквой «J»
Применение управления вектором тяги в будущем может существенно повлиять и на конструкцию планера. Открывается путь к развитию самолетов-бесхвосток, лишенных не только горизонтального, но и вертикального оперения. Отсутствие оперения уменьшает аэродинамическое сопротивление и массу планера.
Заключение
На основании проведенного мной исследования, можно сделать следующие выводы:
Для перехода к новому поколению самолетов требуется новое поколение двигателей.
Для расширения диапазона скоростей полета в сторону низких величин стал необходим управляемый вектор тяги.
Применение управляемого вектора тяги позволяет увеличивать маневренность и достигать сверхманёвренности, иметь укороченный разбег при взлете и быстрый вывод самолета из плоского штопора.
Отклоняемый вектор тяги имеет колоссальную эффективность, значительно превосходящую эффективность аэродинамических рулей самолёта.
Применение ОВТ позволяет не только повысить боевые качества самолета, но и повышает безопасность при совершении взлетов и посадок, а также в сложных условиях.
Развитие двигателей с УВТ будет способствовать появлению истребителей нового поколения и беспилотных летательных аппаратов.
Используемые источники информации
Кузьмина Л. «Пламенные моторы» Архипа Люльки. - Гении авиации, 2014. - 498 с.
Андрей Фомин ОВТ Отклонение вектора тяги дает МиГ-29М принципиально новые возможности // Взлёт. - 2005 08-09
Михаил Туленков АЛ-31ФП - сердце для терминатора // Авиапанорама. - 1997. - №2