Автор: Бадакова Анастасия Васильевна
Место учебы: Гаврилов-Ямский филиал РГАТУ имени П. А. Соловьева
Город: Гаврилов-Ям, Ярославская область
Руководитель: Корнилов Алексей Сергеевич (Инженер-конструктор завода "Агат")
Тема работы: «Летающая платформа: от сказки к летательному аппарату будущего»
Целью моей историко-исследовательской работы является: провести анализ исторических работ, по уникальному виду летательных аппаратов: летающая платформа. В своей работе, я расскажу о том, как появилась идея создания летающих платформ, для каких целей их планировали использовать, и что из этого вышло? А так же проведу анализ работ, которые ведутся на данный момент, расскажу об их преимуществах, недостатках и новых решениях.
Я выбрала эту тему, исходя из прошлой работы. В ней я рассказывала о самых загадочных летательных аппаратах, что заставило меня еще больше углубится в эту тему. Главный вопрос, который я ставила перед собой при написании работы, можно озвучить так: "Есть ли будущее и целесообразность использования, данного вида летающих платформ как транспорта".
План работы:
- Введение.
- Основная часть:
- Первая группа.
- Вторая группа.
- Заключение.
- Источники информации.
Введение
С давних времен умы человечества беспокоила идея создания небольшого и эффективного средства передвижения. Таким требованиям отвечает аппарат, речь о котором пойдет в моей работе: это летающая платформа.
«Летающая платформа — бескрылый вертикально взлетающий аппарат, у которого подъемная сила создается винтами или реактивной тягой». — Авиация: Энциклопедия. — М.: Большая Российская Энциклопедия.
Первые упоминания о таком аппарате можно встретить в сказках, я выбрала наиболее известные платформы: «ступа бабы-Яги» и «ковер-самолет». В следующей части работы, я расскажу об истории развития этих аппаратов, разделив их на две, условные, группы по внешнему виду. К первой группе я отнесла «ступу бабы-Яги» и аппараты похожие на неё, ко второй — «ковер-самолет» и его аналоги в реальном мире.
Первая группа
«Ступа бабы-Яги» — сказочный летательный аппарат, вертикального взлета и посадки. Упоминается в славянской мифологии, как атрибут магического персонажа «баба-Яга».

Рисунок бабы-Яги и её ступы
Чтобы совершить полет на данной платформе, необходимо было залезть внутрь ступы, взять в руки помелу (в некоторых источниках метлу) и совершать возвратно-поступательные движения, придавая ступе ускорение. Помела — служит основным движителем и управляющим элементом ступы.
Влияние этой сказочной платформы, чувствуется на аппараты, которые создавались по заказу армии США, в период с середины 50-х по конец 80-х годов.
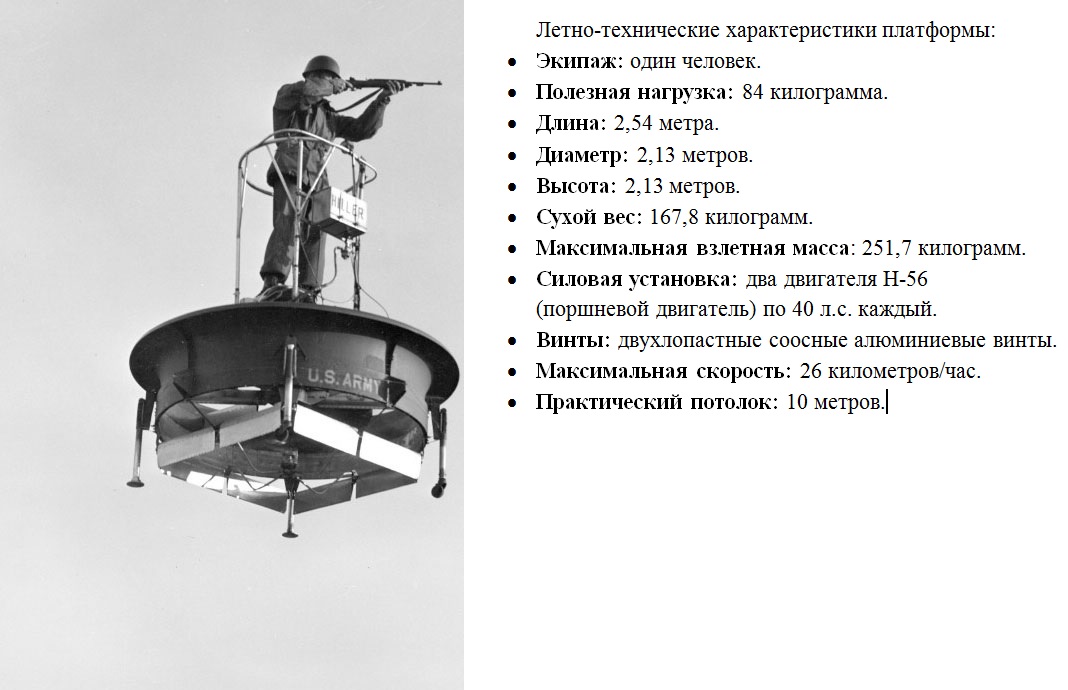
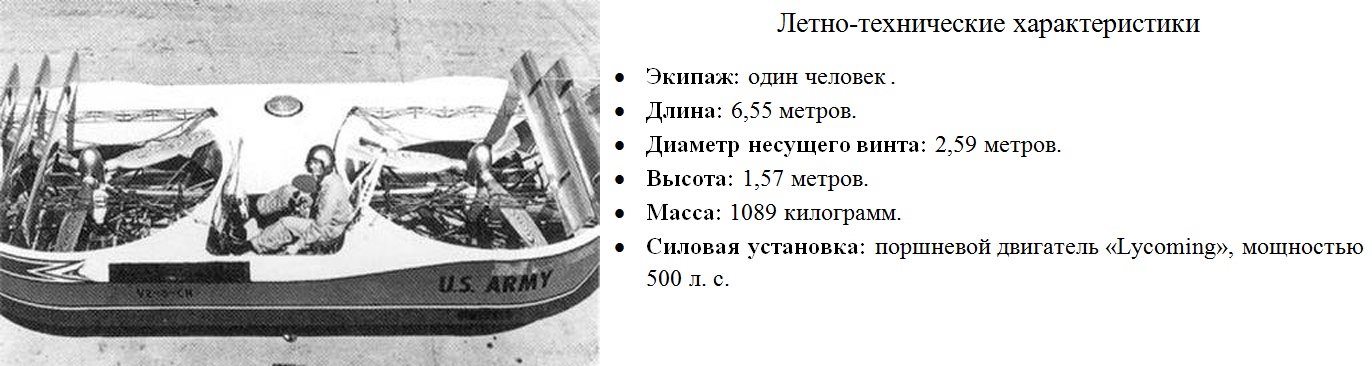
Первый аппарат, о котором я расскажу: “HillerVZ-1 Pawnee”. Он разрабатывался по контракту между армией США и компанией «HillerAircraftCompany», которая специализировалась на вертолетостроении. Конструктора компании активно использовали концепцию американского аэродинамика Чарльза Циммермана. В промежуток с 1953 по 1955 года Хиллеру удалось разработать и собрать первый летающий прототип, на котором удалось совершить первый свободный полет.
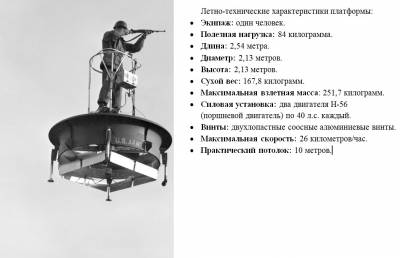
Фотография “HillerVZ-1 Pawnee” и его ЛТХ.
В воздух платформа поднималась на двух двигателях «H-56», мощностью по 40 л. с. каждый, управление аппаратом осуществлялось «кинематическим контролем» — то есть отклонением пилота в нужную сторону. Платформа могла подниматься на высоту около десяти метров, и развивать скорость до 16 км/ч. Спустя некоторое время, был проведен второй этап испытаний, в присутствии военных представителей. По их итогам было принято решение о модификации аппарата: установке дополнительного двигателя, для увеличения мощности и стабильности аппарата. Это решение плохо сказалось на управляемости аппарата. Проблему попробовали решить, установив две пары стабилизаторов под лопастями винтов, но пилоту было трудно до них дотянуться. В итоге рабочее место летчика оборудовали платформой на пружинах, а управление стабилизаторами соединили с датчиком гидростабилизации.
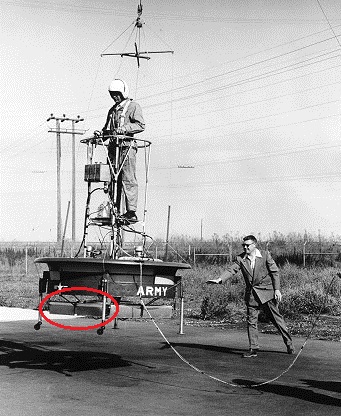
Второе поколение платформы на летных испытаниях.
Красным обведен один из стабилизаторов.
После данных модификаций “VZ-1” стала считаться платформой второго поколения, она совершила первый полет в 1958 году, по результатам испытаний, было принято решение провести глубокую модернизацию аппарата. Изменения коснулись почти всех частей: длину туннеля для винтов увеличили в несколько раз, изменилась конструкция шасси: сделали одну кольцевую опору, место пилота, а также управление платформой стало сильно похожим на управление вертолетом.
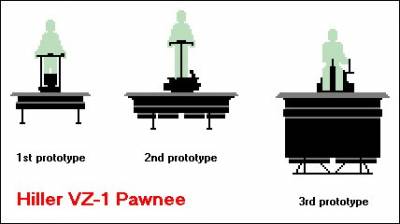
Изображения нескольких поколений “HillerVZ-1 Pawnee”.
Платформу стали относить к третьему поколению. Проведенные летные испытания показали, что полученный результат сильно отличался от желаемого: аппарат был неуклюжий, тяжелый, медленный и слишком заманчивой целью на поле боя. В 1963 году все аппараты вывели из эксплуатации, поставив, таким образом, точку в данном проекте. По моему мнению, программа потерпела неудачу, потому что сделала аппарат слишком сложным. Постоянные модификации, с усложнением конструкции, привели к росту массы аппарата, что пагубно сказалось на его маневренности. Возможно, если бы «HillerAircraftCompany», пошла по пути максимального упрощения платформы и снижения её себестоимости, то заказчик, вероятнее всего, смог бы закрыть глаза на некоторые недочеты.
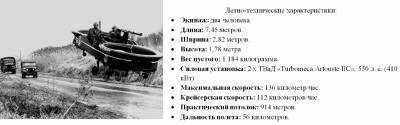
Вторая компания, которая получила контракт на разработку — «DeLacknerhelicoptercompany», которая также занималась вертолетостроением. Их аппарат: “HZ-1” — получился весьма необычным. Отдалённо платформа напоминает гибрид газонокосилки и вертолета. Два соосных винта, диаметром 4,6 метров, приводились в движение одним двигателем «Mercury Marine 20H», мощностью всего в 40 л. с. Низкая мощность двигателя — послужила причиной такого большего размаха винтов. Управлялся аппарат, точно также как “VZ-1” — «кинематическим контролем».
Фотография «De Lackner HZ-1» в полете и его ЛТХ.
Первый полет на привязи состоялся 22 ноября 1954 года, а с января 1955 — начались свободные полеты. Всего было совершенно 160 вылетов, общей продолжительностью, приблизительно, 15 часов, с посадками на воду и сушу. Аппарат мог развивать скорость до 120 км/ч, и подниматься на высоту около 1 500 метров. Отзывы об управляемости аппарата были разные: компания утверждала, что после 30-ти минутного инструктажа, любой человек будет готов к пилотированию; летчик-испытатель Селмер Сандбай был иного мнения: “Мне хватило всего лишь одного полета, для того чтобы понять: обычному человеку будет чертовский трудно управиться с этой конструкцией”. Отрицательно сказывался еще один факт: винты поднимали кучи предметов, лежащих под платформой, которые летели в пилотов, а также способствовал разрушению лопастей. Дважды лопасти аппарата сталкивались между собой, один раз, едва не приведя к гибели пилота. Большое количество недостатков привело к тому, что в 1960 году военные приняли решение прекратить финансирование и закрыть проект.

Фотография аварии, произошедшей с «De Lackner HZ-1».
Я считаю, что, несмотря на простоту, аппарат получился очень неудачным. Возможно, «DeLackner» стоило попробовать увеличить мощность двигателя и уменьшить диаметр винтов, установив на них защитный кожух. Также, раз платформа планировалась для использования в военных целях, не помешала бы защита для пилота.
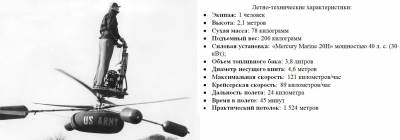
Крайней в этой группе платформой стала “WilliamsX-Jet”, почти полный близнец «ступы бабы-Яги». “X-Jet” был разработан в 1974 году, компанией “WilliamsInternational”, которая специализируется на производстве компактных реактивных двигателей. Внешний вид аппарата полностью соответствует «ступе», различия лишь в силовой установке и принципах управления.

Аппарат “WilliamsX-Jet” и его ЛТХ.
Аппарат поднимался в воздух благодаря модифицированному реактивному двигателю «WilliamsF-107» способным выдавать тягу 2,7 кН. Управление осуществлялось «классическим методом» — отклонениям пилота. Платформа могла находиться в воздухе до 45 минут, взлетать на высоту более 3 000 метров, и развивать скорость около 90 км/ч. В ходе летных испытаний, проведенных в 80-х годах, “X-Jet” продемонстрировал хорошие характеристики, но они не отвечали требованиям заказчика. Армия США приняла решение закрыть программу, отдав предпочтение развитию легких вертолетов.

На левой части рисунка — эскизное изображение “WilliamsX-Jet”,
На правой части рисунка — силовая установка платформы
По моему мнению, разработка получилась удачной, но она не смогла занять свою нишу. Возможно компании “WilliamsInternational”, стоило привлечь инвесторов в других областях. Такой аппарат мог бы занять свое место в сфере кинематографа, репортерских служб, в качестве летающей платформы для оператора, сегодня такую функцию выполняют мульти и квадрокоптеры. Также“X-Jet” мог бы послужить хорошей поддержкой для спасателей или специальных служб, для операций в городских условиях. Применений ей можно было бы найти и в сфере развлечения: современные системы управления позволили бы использовать платформу как летающего гида, который позволил бы смотреть на достопримечательности «совершенно с другого ракурса».
Аппаратов, влияния на которые оказала «ступа бабы-Яги», было не так много. По-моему это была тупиковая ветвь развития летающих платформ. Недостатками данной компоновки являются:
- плохая устойчивость аппарата, связанная с тем, что центр масс находился выше винтов, или реактивного двигателя, это сказывалось и на управляемости платформы;
- расположение винта в нижней части аппарата создает опасность не только для пилота и обслуживающего персонала из-за риска попадания частей тела на вращающиеся поверхности, но и целостности аппарата.
- положение, занимаемое пилотом — выбрано не самое выгодное, во-первых по стоящему человеку на летящей платформе легче попасть, во-вторых очень трудно держать равновесие на находящийся в движении с большой скоростью поверхности.
Даже располагая новейшими технологиями, данная схема выглядит достаточно проигрышно на фоне схем второй группы, о которых я расскажу далее:
Вторая группа
«Ковер-самолет» — сказочная летающая платформа, получившая широкую известность благодаря литературе Ближе Востока.

Изображение «ковра-самолета»
Первое упоминание об этом аппарате было сделано в памятнике средневековой литературе, собрании рассказов «Тысяча и одна ночь». Именно популярность этой сказки принесла мировую известность «ковру-самолету»и он занял почетное место в Западной и Советской литературе. Его упоминала Джоан Роулинг в серии книг о Гарри Потере, Ден Симмонс в цикле рассказов «Песни Гепериона», великий русский художник Виктор Васнецов написал две картины, на которых присутствует его изображение, также он упоминался в таких Советский фильмах-сказках как: «Старик Хоттабыч», «Кощей Бессмертный», «Понедельник начинается в субботу», и многих других произведениях.

Картина Виктора Васнецова
Из описаний в сказках и рассказах можно сделать вывод о принципе работы данной платформы: после приведения его в летную готовность (как правило, разворачивание ковра, так как для удобной транспортировки его скручивают), пилот занимает удобную позицию для путешествия, берется за рули направления, которыми служат кисточки по углам ковра, или просто его уголки и совершает управляемый полет на неограниченные высоты и расстояния. В качестве основной силовой установки выступает магическая энергия заключенная, по всей видимости, в нити из которых сшит ковер.
Неявные, на первый взгляд, отсылки к этому сказочному аппарату присутствуют и в истории создания летающих платформ, разными странами и в разное время. Чаще всего это сходство во внешнем виде, и принципе размещения пилота на платформе.
Начнем мы с 1956 года, когда военное представительство США заинтересовалось возможностью создания небольшого по размерам, эффективного, воздушного средства передвижения для сухопутных войск. На разработку такого аппарата был объявлен конкурс, и один из контрактов достался компании «Curtiss-Wright», известную как крупнейший производитель военных самолетов в годы Второй мировой войны. В ходе разработки конструкторам компании удалось создать “VZ-7” — экспериментальный летательный аппарат вертикального взлета и посадки.

Общийвид”Curtiss-WrightVZ-7” и его ЛТХ.
Конструкция летающей платформы состоит из несущей рамы, на которой установлен реактивный двигатель, четыре воздушных винта, рабочее место пилота, топливные и масленые баки, шасси и система управления. К середине 1958 года аппарат был собран и готов к летным испытаниям. Их результаты показали, что летно-технические характеристики аппарата не соответствуют заявленным, однако комиссия отметила высокую стабильность аппарата, малошумность и простоту управления, не требующую от пилота высокой квалификации. Существенным недостатком аппарата было то, что на винтах отсутствовала какая-либо защита, это представляло собой серьезную угрозу для пилота и обслуживающего персонала. Но военные ведомства, в первую очередь, не устраивала низкая скорость аппарата: установленный двигатель «TurbomecaArtouste» мощностью 430 л. с. не позволял аппарату с массой 771 килограмм, развивать скорость более 51 км/ч и подниматься на высоту более 60 метров. Однако все эти недостатки не помешали использовать аппарат вплоть до 1960 года. В итоге платформу вернули обратно в распоряжение компании. В воздух “VZ-7” поднимался на четырех винтах, вращение на которые передавалось от свободного вала ТВаД. Маневры осуществлялись с помощью изменения оборотов на одном, или нескольких, винтах.

”Curtiss-WrightVZ-7” во время одного из полетов
Данный аппарат, по моему мнению, пошел по ошибочному пути выбора силовой установки. Вспомогательное оборудование и необходимый для продолжительной работы запас топлива и масла, имеют в сумме большую массу, что критично для данного вида летательных аппаратов. Использование обычного ДВС, в теории, могло бы существенно снизить вес, приходящийся на силовую установку, а также сделать аппарат более реализуемым в техническом плане.
Следующий аппарат, внешний вид которого отдаленно напоминает «ковер-самолет» — “ChryslerVZ-6”, это вторая компания, получившая контракт на разработку в 1956 году. Разработкой конкурента “VZ-7” занималась фирма “Chrysler”, основная специализация которой — автомобилестроение. Конструкторам компании за два года удалось разработать и собрать первый летающий прототип. В основе конструкции аппарата — два винта, расположенные на одной оси, в передней и задней частях аппарата.

Общий вид «ChryslerVZ-6»
По центру располагалось рабочее место пилота и силовая установка с системами управления. Отличительной чертой “VZ-6” была резиновая “юбка”, которая увеличивала подъемную силу винтов, за счет эффекта «воздушной подушки». Проведенные в 1959 году летные испытания показали недостатки продольной схемы расположения винтов: аппарат имел плохую устойчивость, также масса аппарата в 1000 килограмм оказалась тяжелой ношей, даже для двигателя мощностью 500 л. с. Первый полет без привязи закончился аварией: аппарат потерял стабилизацию и перевернулся, пилот отделался легкими ушибами. Несмотря на то, что на первый взгляд “VZ-6” выглядел более перспективным по сравнению с “VZ-7”, программу закрыли в 1960 году, аналогично конкуренту. По моему мнению, успешной реализации проекта помешало отсутствие на тот время систем цифрового управления. Система автоматического управления из гироскопов и акселерометров, могла бы существенно упростить пилотирование данного аппарата, сведя к минимуму возможность дестабилизации. Ко всему этому компания сделала аппарат слишком тяжелым.
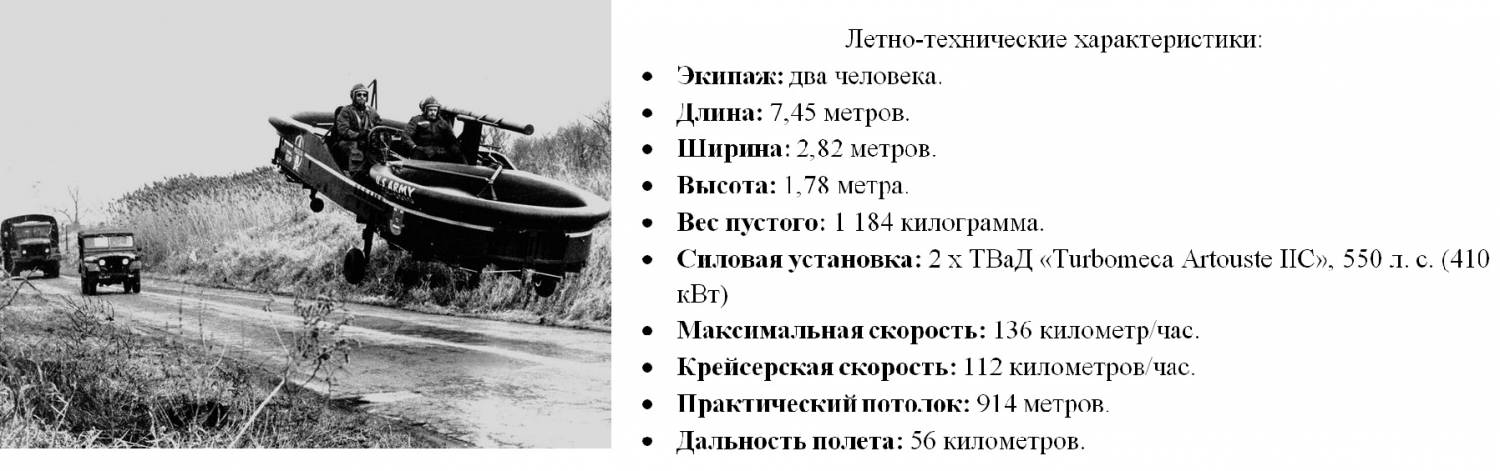
Другая разработка достойная внимания: “PiaseckiVZ-8“Airgeep” — по моему мнению, это самая удачная летающая платформа ХХ века. История его создания берет свое начало в 1957 году, когда стало понятно что “VZ-6”и “VZ-7” не оправдали ожиданий военных. Генеральный конструктор платформы — Френк Пясецкий, является основоположником вертолетостроения с продольной схемой винтов в США. В период с 1957 по 1958 года, был разработан и собран первый летающий прототип платформы. По конструкции “VZ-8”сильно схож с “VZ-6”: винты расположены по одной оси, в передней и задней частях аппарата, каждый винт вращается отдельным ДВС в ранних версиях, и одним ТВаД в поздних. Пилот и штурман располагаются в пространстве между кожухами винтов.
Фотография «PiaseckiVZ-8 «Airgeep» в полете
Большой опыт в проектировании вертолетов позволил Френку Пясецкому создать удачный аппарат, с простым управлением, сильно похожим на управление вертолетом, а также хорошей курсовой устойчивостью. Отличительной особенностью аппарата было не только наличие двух двигателей, но и соединение их в общую коробку передач. Такое решение позволяло сохранить аппарат, даже при отказе одного из двигателей. Еще одной отличительной чертой аппарата стало размещение винтов, под небольшим углом друг к другу, такое решение позволяло развивать гораздо более высокие скорости. Первый полет “VZ-8” состоялся в 1958 году: в воздух поднялась модель под индексом «59KSkycar», оснащенная двумя двигателями «LycomingO-360-A2A» по 180 л. с. каждый, военные представители хорошо оценили возможности аппарата, и предложили оснастить его одним реактивным двигателем «TurbomecaArtousteIIB» мощностью 425 л. с., также его оснастили поплавками для испытания в составе ВМС США. После модификации модель получила название “59N “SeageepI”, первый полет прототипа состоялся в 1959 году, военным машина понравилась и они забрали её для строевых испытаний.

Фотография «59N «SeageepI» в полете
По их результатам были даны рекомендации по доработке и улучшению аппарата. Силовую установку заменили на более легкую и мощную: «AirsearchTPE331-6» мощностью 550 л. с., также были внесены некоторые изменения во внешнем виде аппарата и его системе управления. После модификаций аппарат получил название “AirgeepII” или “VZ-8P-2”. В новом виде платформа имела 5 мест, два катапультируемых для пилотов, и три для пассажиров. Аппарат мог развивать скорость до 136 км/ч и подниматься на высоту около 900 метров. Также платформа получила возможность передвигаться на колесной базе. Первый полет “AirgeepII” совершил 15 февраля 1962 года. Результаты испытаний показали, что аппарат удовлетворяет всем требованиям армии США, но военное ведомство решило закрыть программу как неперспективную, и сосредоточить внимание на развитии вертолетов. По моему мнению, данный аппарат мог бы стать первой серийно-выпускаемой летающей платформой. В нем решены все проблемы, присущие моделям-конкурентам. В разработках XXIвека чувствуется вдохновение не только «ковром-самолетом» но и этим замечательным аппаратом.
После затишья, которое длилось почти половину столетия, работы по тематике летающих платформ были возобновлены. Но теперь аппарат направлен на более широкую сферу потребителей: любители туризма и экстрима. Первым о намерении создания такой платформы, в 2008 году заявила американская компания “Aeroflex” их аппарат называется “Aero-X”.

Общий вид «Aero-X»
Проведя анализ можно сделать вывод, что компанией был учтен опыт прошлых разработок: винты расположены на одной оси, в передней и задней частях аппарата, каждый винт приводится во вращение отдельным двигателем, также имеется аварийный — третий двигатель. Место пилота оборудовано с максимальной приближенностью к внешнему виду мотоцикла или квадроцикла. Использование новейших технологий позволило сделать аппарат устойчивым и мало-восприимчивым даже к сильным потокам ветра. Также максимальная высота полета была ограничена до четырех метров, сделано это для того, чтобы управлять платформой можно было без лицензии пилота. Внешний вид аппарата сильно напоминает “VZ-8”, два туннельных винта, расположенных под небольшим углом друг к другу. Силовая установка “Aero-X” работает на обычном бензине, и способна разогнать аппарат до 72 км/ч. В продажу данная платформа должна поступить в 2017 году.

Один из первых прототипов «Aero-X» на летных испытаниях
По моему мнению, у “Aero-X” есть хорошие шансы занять данную нишу на рынке. Наше общество не первый год грезит появлением летающих платформ, а выходящие сегодня новинки киноиндустрии, только подогревают эту жажду.
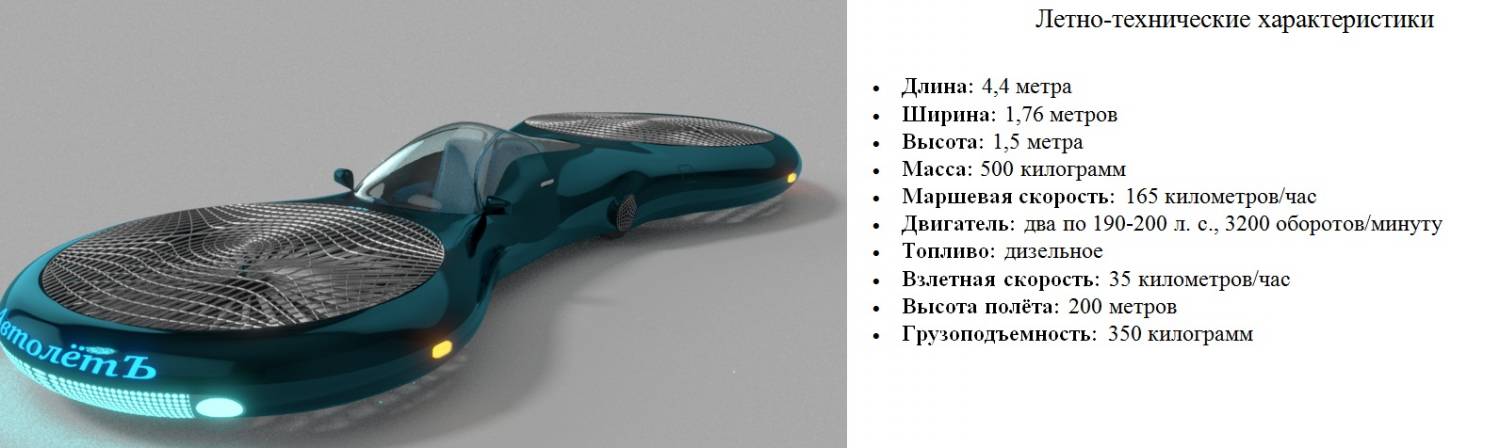
Крайняя разработка, о которой я хотела бы рассказать из России. Это проект Артема Васинюка под названием «Автолетъ». Внешний вид аппарата выполнен в своеобразном каноне летающих платформ с продольной схемой расположения винтов. Однако у разработки есть свои уникальные стороны: на каждой оси находится по два соосных винта, стабилизация и управление аппаратом осуществляется с помощью створок типа «жалюзи», которые расположены в нижней части ниш винтов.

Общий вид аппарата «Автолетъ»
Силовая установка — дизельная, по одному двигателю, мощностью около 200 л. с. на каждую пару винтов. Аппарат должен подниматься на высоту около 200 метров, и развивать скорость более 165 км/ч. В дальнейшем не исключен переход на электродвигатели. В данный момент ведутся конструкторские работы, по задумке автора в 2017 году планируется построить первый образец-беспилотник, в 2018 пилотируемый вариант, а в 2020 выйти на малосерийный выпуск.

Основные элементы конструкции платформы «Автолетъ»
Мое мнение относительно проекта такое: в условиях нашей страны, данный аппарат может раскрыть все свои лучшие стороны, однако это возможно только при более низкой, или сопоставимой с вездеходеходами и амфибиями стоимости. Заменить такой платформой легковой автомобиль будет очень трудно, несмотря на явные преимущества. Связанно это с тем, что инфраструктура нашей страны находится в неготовом для таких перемен состоянии. Массовый переход на данный вид средства передвижения потребует реформ сразу в нескольких областях:
- необходимо будет полностью изменять правила движения и способы обучения, водительское удостоверение будет иметь схожую с лицензией пилота СЛА силу;
- также нужно будет пересмотреть подход к дорогам общего пользования: потребность в них будет минимальная, но нужно будет заменить их на альтернативу: что-то вроде «воздушных коридоров». Но убрать дороги окончательно не получится, они будут использоваться специальной и большегрузной техникой, которую нецелесообразно делать воздушной, по экономическим причинам;
- изменения затронут сферу обслуживания (места парковки, мойки и т. п.) и ремонта. СТО должен будет иметь более новое, в техническом плане, оборудование, и персонал соответствующей квалификации;
- самые масштабные изменения затронут производства. Общий подход останется тот же, но возникнет потребность в использовании качественно нового оборудования, а также разработке технологических процессов гораздо более высокого уровня.
Заключение
В качестве заключительной части моего рассказа об истории летающих платформ, я бы хотела ответить на главный вопрос своей работы. Как я уже упоминала ранее, слово «будущее» прочно ассоциируется у людей не только с покорением дальних уголков космического пространства, прорывах в медицине и биологии, но и с летающим транспортом. Все аппараты, упомянутые в моей работе — маленькие шаги на пути к большой цели. Все они внесли свой вклад в развитие этого направления, и нашей задачей, является умело его использовать. И подобно тому, «как театр начинается с вешалки» — переход нужно осуществлять с малого. Именно из этих соображений я сформировала свое представление, как бы мог выглядеть промежуточный аппарат для перехода: объединение колесной базы квадроцикла с устройством для создания вертикальной подъемной силы. Основные задачи, которые я ставила перед собой, можно озвучить так: объединение лучших качеств летающей платформы и квадроцикла, не теряя при этом высокой проходимости колесной базы, обеспечение хорошей стабильности и маневренности в воздухе, а также максимально простое и интуитивно понятное управление аппаратом. На данном этапе работ, формируется внешний облик аппарата, его общие характеристики, выбирается силовая установка.
Внешний облик аппарата
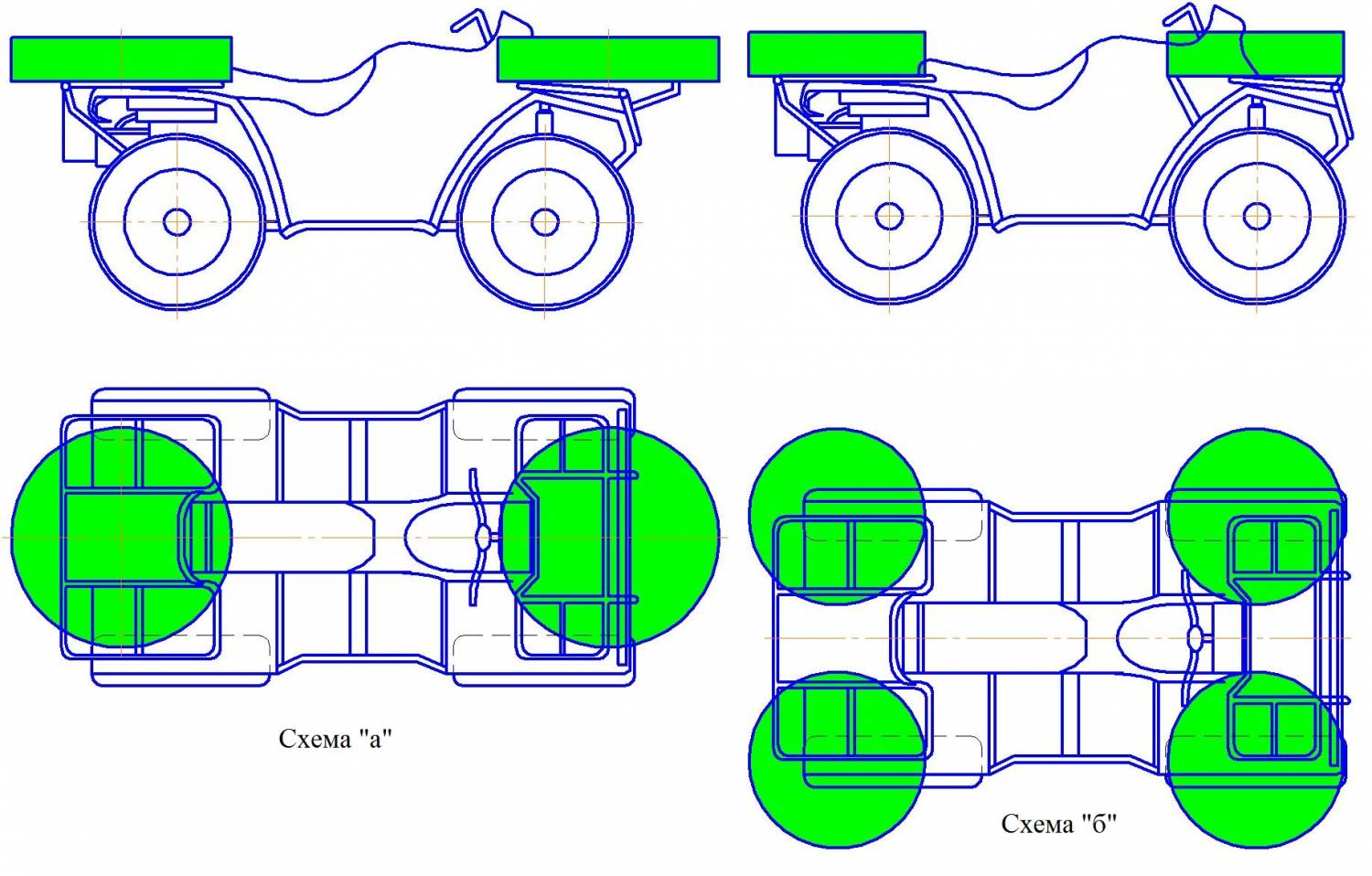
Проведенный мной анализ позволил сформировать два основных направления развития внешнего облика аппарата. Первое направление: использование двух винтов большого диаметра продольного расположения. Такая схема, теоретический, имеет ряд преимуществ: малые габариты подъемной установки, меньшее количество необходимых двигателей, простота обслуживания, меньший расход топлива, по сравнению со второй схемой. И ряд недостатков: меньшая устойчивость аппарата, больший вес винтов, более низкое ограничение на максимальную скорость вращения винтов. Несмотря на большое распространение данной схемы в действующих аппаратах, наличие существенных недостатков привело к разработке второго направления: четыре винта, расположенные по схеме «квадрокоптер». Такая схема сочетает в себе хорошие летные качества, имеет большую устойчивость, и, при достаточно глубокой проработке, почти не имеет существенных недостатков. Я считаю, что данная схема наиболее перспективная, и имеет больше шансов для реализации.
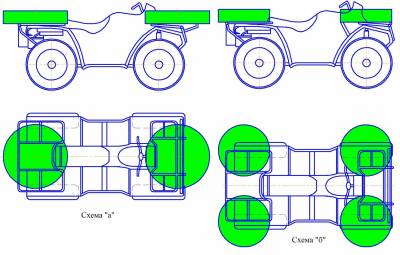
На рисунке: а — схема с продольным расположением винтов; б — с четырьмя винтами
Также был проведен анализ габаритных характеристик, как квадроциклов, так и разрабатываемых на данный момент летающих платформ, что позволило вычислить средний размер.
| Модель |
Длина |
Ширина |
Высота |
Клиренс |
Колесная база |
| OUTLANDER 1000 X MR |
2 184 |
1 168 |
1 260 |
279 |
1 295 |
| YAMAHA Grizzly 700 SE |
2 065 |
1 180 |
1 240 |
275 |
1 250 |
| Honda TRX680 Rincon |
2 113 |
1 189 |
1 207 |
254 |
1 289 |
| Kawasaki KVF750 EPS Camo |
2 195 |
1 180 |
1 220 |
240 |
1 285 |
| Suzuki KingQuad 750 AXi |
2 165 |
1 250 |
1 245 |
280 |
1 285 |
| Aero-X |
4 500 |
2 100 |
1 250 |
|
|
| MA Hoverbike |
3 000 |
1 300 |
550 |
|
|
| Сумма: |
18 222 |
9 367 |
7 972 |
1 328 |
6 404 |
| Среднее: |
2 603 |
1 338 |
1 139 |
266 |
1 281 |
Были сформированы примерные основные технические требования к аппарату, с учетом сфер применения:
| |
Военная сфера |
Гражданская сфера |
Спасательная сфера |
| Полезная нагрузка |
350 кг |
200 кг |
300 кг |
| Сухая масса |
450 кг |
450 кг |
450 кг |
| Объем бака |
60 л. |
60 л. |
40 л. |
| Количество баков |
2 шт. |
1 шт. |
2 шт. |
| Мощность двигателя |
150 л.с.
1800куб. см
|
90 л.с.
1000 куб. см
|
100 л.с.
1200 куб. см
|
| Привод |
4 колеса |
4 колеса |
4 колеса |
| Максимальная высота полета |
5 метров |
5 метров |
5 метров |
| Максимальная скорость полета |
45 км/ч |
35 км/ч |
35 км/ч |
| Крейсерская скорость полета |
30 км/ч |
20 км/ч |
20 км/ч |
| Дальность полета |
500 метров |
200 метров |
500 метров
|
Проведенный анализ возможной силовой установки определил два основных направления: двигатель внутреннего сгорания и электродвигатели. Оба типа силовой установки имеют сильные стороны, например, при установке ДВС появляется возможность быстрой замены потребляемого вида энергоресурсов (топлива), в случае с электродвигателем это сопряженно с определенными трудностями, при этом ЭД более прост в обслуживании и имеет на порядок меньше подвижных частей.
| Электродвигатель |
Двигатель внутреннего сгорания |
| Простота обслуживания |
Простота эксплуатации |
| Более высокие крутящие моменты |
Более низкая общая стоимость |
| Маленькие габариты |
Широкий диапазон работ |
| Отсутствие многих систем (выхлопа и т.д.) |
Более низкое потребление ресурсов |
Основные сферы применения: военная и спасательная, но это не мешает использовать аппарат в сфере туризма и экстрима.Возможное объединение силовых установок двух типов: на колесную базу ДВС, на подъемное устройство ЭД, позволит использовать их лучшие стороны.
В военной сфере: аппарат может занять прочное место, как незаменимый помощник для сухопутных войск.
В спасательной сфере, эта платформа объединит качества двух средств передвижения: вездехода и автожира. Этот аппарат способен перевозить пассажира, все, что нужно для оказания первой помощи, а так же вещей первой необходимости.
Следующим этапом в развитии проекта — будут расчетно-графические работы. Приоритетными задачами данной стадии являются: профилирование лопастей воздушных винтов; расчет прочностных характеристик одного из вариантов каркаса; оформление конструкторской документации; определение окончательных массогабаритных параметров платформы. В задачу «профилирование лопастей воздушных винтов» также включены и макетные испытания, для практического подтверждения теоретических результатов.
Источники информации:
- Авиация: Энциклопедия. — М.: Большая Российская Энциклопедия, 1994.
- Академик (английская версия): статья «Curtiss-Wright VZ-7»
- Академик (английская версия): статья «de Lackner HZ-1 Aerocycle»
- Академик (русскоязычная версия): статья «Летающая платформа»
- Академик (русскоязычная версия): статья «Hiller VZ-1 Pawnee»
- Батонанет: статья «Летающие автомобили, существовавшие в реальности»
- Викиванд (английская версия): статья «Hiller VZ-1 Pawnee»
- Викимедия (английская версия): статья «Category:HZ-1 Aerocycle»
- Википедия (английская версия): статья «Williams X-Jet»
- Википедия (русскоязычная версия): статья «Curtiss-Wright VZ-7»
- Википедия (русскоязычная версия): статья «Hiller VZ-1 Pawnee»
- Википедия (русскоязычная версия): статья «Williams X-Jet»
- Военное обозрение: статья «Летающая платформа «De Lackner HZ-1»
- Оружие России: статья «Нереализованные проекты: Curtiss-Wright VZ-7 (США) - летающий автомобиль, который существовал в действительности»
- Официальный сайт компании «Aerofex»
- Пикабу: статья «Летательный аппарат "williams x-jet" 1974 года»
- Популярная механика: статья «Эскадрон летучих пехотинцев: Рожденные летать так и не полетели»
- Постсовет: статья «Летающая платформа De Lackner HZ-1»
- Сайт авиационного музея Хиллера: статья «Hiller Flying Platform»
- ATD: статья «Aero-X Hoverbike — технология Звёздных войн наяву»
- Automotonews: статья «ЛЕТАЮЩИЙ ДЖИП» КОМПАНИИ CHRYSLER»
- Aviastars (английская версия): статья «De Lackner DH-4 "Heli-Vector" / HZ-1 "Aerocycle"»
- Aviastars (английская версия): статья «Hiller VZ-1 "Pawnee"»
- Aviastars (английская версия): статья «Piasecki 59 / VZ-8P "Airgeep"»
- Aviastars (русскоязычная версия): «Hiller VZ-1 "Pawnee"»
- Complex: статья «A History of the Flying Car»
- GunBroker: раздел форума: «Williams WASP X- Jet»
- Rusbas: статья «Летающий Aero-X Hoverbike поступит в продажу в 2017 году»
- Secretprogects: раздел форума «Hiller's VZ-1E « Pawnee » and other ducted-fan flying platforms»
- Steampenker: статья «Hiller VZ-1 Pawnee или "летающий кулер" (проба пера)»
- Terminally Incoherent: статья «Williams X-Jet»
- WikiWarriors (русскоязычная версия): статья «Hiller VZ-1 Pawnee»
|
























 Удачи!!!
Удачи!!!