Свечников Григорий Алексеевич
Мультироторные беспилотные летательные аппараты
Цели работы:
- Изучить основные летные характеристики промышленных и самодельных моделей
- Рассказать о постройке небольшого квадрокоптера в домашних условиях
- Определить стоимость основных деталей
- Сводный анализ ценовых и качественных показателей.
- Рассказать о том , какие квадрокоптеры лучше -самодельные или заводские.
Введение:
Итак, зачем-же нужны такие аппараты?
На сегодняшний день, по данным ведущей международной ассоциации беспилотных систем UVS International, малоразмерные беспилотные летательные аппараты (БПЛА) производят в 52 странах мира. Заинтересованные государственные ведомства и спецслужбы, функции которых связаны с охраной, контролем и мониторингом объектов, а также ликвидацией ЧС, а также фирмы, бизнес которых связан с получением пространственных данных, проявляют активный интерес к БПЛА.
БПЛА – это летательный аппарат без экипажа на борту, использующий аэродинамический принцип создания подъемной силы с помощью фиксированного или вращающегося крыла ,оснащенный двигателем и имеющий полезную нагрузку и продолжительность полета, достаточные для выполнения специальных задач.
История квадрокоптера:
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых квадрокоптеров который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году. $IMAGE
Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение хвостового винта и автомата перекоса положило конец этим попыткам. Новые разработки начались в 1950-е годы, но дальше прототипов дело не продвинулось.
Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции квадрокоптеры часто используются в любительском моделировании[2]. Мультикоптеры удобны для недорогой аэрофото- икиносъёмки — громоздкая камера вынесена из зоны действия винтов. 
Принцип действия:
Многороторные БПЛА относятся к аппаратам вертолетного типа классов «мини», «микро» и «нано». Такой аппарат представляет собой (рис. 1) радиоуправляемую летающую платформу с бесколлекторными двигателями с пропеллерами.ПЛАТФОРМА состоит из рамы, на которой монтируется основная плата управления и приемо-передатчик для связи с наземным комплексом. На лучах рамы монтируются бесколлекторные двигатели, каждым из которых управляет отдельный регулятор. На плате расположен специализированный процессор, который обрабатывает команды, полученные от аппаратуры радиосвязи, и управляет стабилизацией платформы в горизонтальной плоскости. Стабилизация достигается за счет получения данных об углах наклона с трех гироскопов и акселерометров. Система также может анализировать данные с датчика давления, установленного на основной плате и, обрабатывая их, «держать» аппарат на заданной оператором высоте. состоит из рамы, на которой монтируется основная плата управления и приемо-передатчик для связи с наземным комплексом. На лучах рамы монтируются бесколлекторные двигатели, каждым из которых управляет отдельный регулятор. На плате расположен специализированный процессор, который обрабатывает команды, полученные от аппаратуры радиосвязи, и управляет стабилизацией платформы в горизонтальной плоскости. Стабилизация достигается за счет получения данных об углах наклона с трех гироскопов и акселерометров. Система также может анализировать данные с датчика давления, установленного на основной плате и, обрабатывая их, «держать» аппарат на заданной оператором высоте. 
На некоторых моделях стоит GPS или ГЛОНАС приемник, позволяющий записывать маршрут полёта заранее, с компьютера, а также, возвращать аппарат в точку взлёта, в случае потери управляющего радиосигнала, или снимать параметры полёта оперативно или потом[3].
В настоящее время благодаря разработанному дополнительному оборудованию аппарат имеет возможность осуществлять фактически полуавтономные и автоматические полеты.
Мультикоптеры имеют 2 или более винтов постоянного шага , автомата перекоса, в отличие от одно- и двухвинтовых аппаратов, нет. Каждый винт приводится в движение собственным двигателем. Половина винтов вращается по часовой стрелке, половина — против, поэтому хвостовой винт мультикоптеру не нужен. Маневрируют мультикоптеры путём изменения скорости вращения винтов. Например:
- ускорить все винты — подъём;
- ускорить винты с одной стороны и замедлить с другой — движение в сторону;
- ускорить винты, вращающиеся по часовой стрелке, и замедлить вращающиеся против — поворот.
Первый аппарат с которого я начну это квадрокоптер от компании DJI – phantom 3

Технические характеристики:
| |
|
Размер по диагонали (включая пропеллеры): 590 мм.
|
|
|
Точность посадки: По вертикали: +/- 10 см.
По горизонтали: +/- 1 м.
|
|
|
Макс. скорость полета: 16 м/с.
|
|
|
Макс. высота полета: 500 м. (ограничено програмно)
|
|
|
Температура рабочей среды : от 0 до +40 градусов по Цельсию
|
|
|
Поддержка систем навигации : GPS/ГЛОНАСС
Рабочая частота сигнала управления: 2.4 GHz
Емкость аккумулятора: 4800mAh
Напряжение аккумулятора: 15.2V
Полетное время: примерно 20-25 мин.- на средней высоте.
Максимальный вес на борту: 2000 г.
Камера : снимает в режиме 4K c разрешением в 12 мегапикселей с частотой кадров-24
Стоимость: 100 тыс. рублей
|
|
|
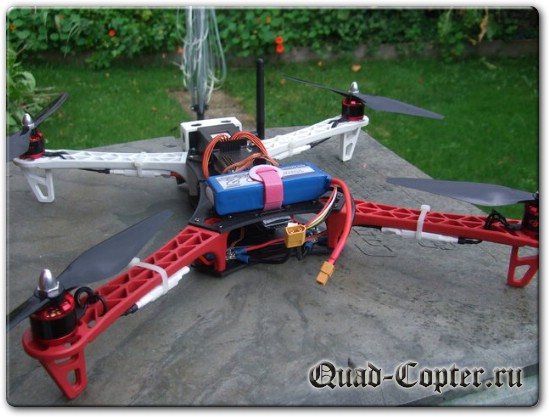
2модель:самодельный квадрокоптер на раме HJ500

|
|
|
Размер по диагонали (включая пропеллеры) :580мм
|
|
| |
|
| |
|
|
Точность посадки: По вертикали: +/- 10 см.
По горизонтали: +/- 1 м.
|
|
|
Макс. скорость полета : 14 м/с
|
|
|
Макс. высота полета : 1000-1500м(ограничено дальностью действия аппаратуры)
|
|
|
Температура рабочей среды : -20 - +40°C
|
|
|
Поддержка систем навигации: GPS
|
|
|
|
|
|
Рабочая частота сигнала управления: 2.4 GHz
Емкость аккумулятора: 2200mAh
Напряжение аккумулятора: 11.1V
Полетное время: примерно 6-10 мин.- на средней высоте.
Максимальный вес на борту: 3000 г.
Камера : Mobius снимает в режиме full HD с частотой кадров-60
Стоимость всех компонентов: 33тыс. рублей
|
|
|
3модель: квадрокоптер от компании walkera-runner 250 fpv

Размер по диагонали (включая пропеллеры) :266мм
|
|
|
|
|
|
По вертикали: +\- 10 см.
|
|
|
Точность посадки: По горизонтали :+/- 0,5 м.
|
|
|
Макс. скорость полета : 18м/с
|
|
|
Макс. высота полета : 1000м(ограничено дальностью действия аппаратуры)
|
|
|
Температура рабочей среды : -20 - +40°C
|
|
|
Поддержка систем навигации: GPS
|
|
|
|
|
|
Рабочая частота сигнала управления: 2.4 GHz
Емкость аккумулятора: 2200mAh
Напряжение аккумулятора: 11.1V
Полетное время: примерно 12-13 мин.- на средней высоте.
Максимальный вес на борту: 800 г.
Камера : sony 600 tvl снимает в режиме hd -30fps
Стоимость: 45тыс. рублей
|
|
|
4модель: квадрокоптер на раме zmr 250

Размер по диагонали (включая пропеллеры) :266мм
|
|
|
|
|
|
|
|
|
Точность посадки -----------
|
|
|
Макс. скорость полета : 17м/с
|
|
|
Макс. высота полета : 1000м(ограничено дальностью действия аппаратуры)
|
|
|
Температура рабочей среды : -20 - +40°C
|
|
|
Поддержка систем навигации: -------
|
|
|
|
|
|
Рабочая частота сигнала управления: 2.4 GHz
Емкость аккумулятора: 1800mAh
Напряжение аккумулятора: 14.8V
Полетное время: примерно 10-13 мин.- на средней высоте.
Максимальный вес на борту: 500 г.
Камера : sony 600 tvl снимает в режиме hd -30fps
Стоимость всех компонентов: 27 тыс. рублей
5модель: мой квадрокоптер на раме zmr 250

Размер по диагонали (включая пропеллеры) :266мм
Точность посадки -----------
Макс. скорость полета : 17м/с
Макс. высота полета : 1000м(ограничено дальностью действия аппаратуры)
Температура рабочей среды : -20 - +40°C
Поддержка систем навигации: -------
Рабочая частота сигнала управления: 2.4 GHz
Емкость аккумулятора: 2200mAh
Напряжение аккумулятора: 11.1V
Полетное время: примерно 12-15 мин.- на средней высоте.
Максимальный вес на борту: 500 г.
Камера : снимает в режиме hd -30fps
Стоимость всех компонентов: 11 тыс. рублей
|
|
|
|
|
|
|
|
|
|
Итак, как же построить квадрокоптер в домашних условиях.
Во первых нужно определиться с конфигурацией будущего квадрокоптера- в моем случае использовались : маленький , но довольно функциональный полетный контроллер-open pilot cc3d mini

двигатели dys 2300kv

регуляторы оборотов на 10A

аккумуляторы напряжением 11.1V и ёмкостью 2200mAh

аппаратура управления: fly sky T-6

Определившись с комплектацией квадрокоптера, я приступил к его сборке
Сначала я собрал основу , на которой будут крепиться все детали.
Далее измерил площадку и перенес эти размеры в программу sprint layout , для того , чтобы создать на этой основе плату распределения питания, стабилизатор напряжения для полетного контроллера и подсветку для квадрокоптера. После этого я изготовил плату ,”примерил” ее к квадрокоптеру и занялся укреплением двигателей и регуляторов к лучам. Припаял все компоненты на плату, закрепил на ней контроллер полета и приемник и проверил все на работоспособность.
Удостоверившись, что все работает, я собрал до конца раму и начал настраивать полетный контроллер.
Настройка проходила в несколько этапов
- Установка программного обеспечения на контроллер полета
- Настройка гироскопов, компаса и акселерометра
- Настройка регуляторов оборотов
- Сохранение всех настроек
- Подключение каналов радиоуправления
- Калибровочные настройки
После всех этих манипуляций я совершил пробный взлет. Он прошел успешно.
сводный анализ ценовых и качественных показателей:
|
квадрокоптер
|
размер
|
Основные характеристики
|
цена
|
|
|
|
Полетное время
|
скорость
|
Наличие камеры
|
Наличие систем навигации
|
|
|
DJI – phantom 3
|
590мм
|
20-25 мин.
|
16 м/с.
|
есть
|
есть
|
100 тыс. рублей
|
|
HJ500
|
580мм
|
6-10 мин.
|
14 м/с
|
есть
|
есть
|
33 тыс. рублей
|
|
walkera-runner 250 fpv
|
266мм
|
12-13 мин.
|
18м/с
|
есть
|
есть
|
45 тыс. рублей
|
|
zmr-250
|
266мм
|
10-13 мин.
|
17 м/с
|
есть
|
нет
|
27 тыс. рублей
|
|
Мой квадрокоптер :zmr-250
|
266мм
|
12-15 мин.
|
17 м/с
|
есть
|
нет
|
11 тыс. рублей
|
Выводы:
Подводя итоги , я могу сказать , что квадрокоптеры созданные вручную значительно опережают заводские по нескольким пунктам:
Во-первых - их цена. Заводские квадрокоптеры значительно дороже самодельных , хотя их характеристики максимально близки.
Во-вторых – возможность адаптации под конкретные и индивидуальные задачи например как счетчик Гейгера , видеокамеры , системы лазерного наведения и т.п..
Ну и третий пункт - это, конечно же, интерес и опыт, который появляется во время постройки подобных моделей.
Использованные ресурсы:
Квадрокоптер 1: https://www.kvadrokopter.pro/multicopters/dji-phantom-3-professional/
Квадрокоптер 2: http://mysku.ru/blog/china-stores/23587.html
Квадрокоптер 3: Длинная ссылка
Квадрокоптер 4: http://www.parkflyer.ru/ru/blogs/view_entry/11188/
|