Автор: Кильметов Рафаэль Айдарович
Возраст: 17
Место учебы: МОБУ СОШ №4
Город, регион: Нефтекамск, Республика Башкортостан
Руководитель Гиззатуллина Алсу Нарисовна, МОБУ СОШ №4, учитель физики.
Историко-исследовательская работа "История и перспективы развития вертолетного винта"
План:
- Введение
- История развития вертолётов
- Система управления вертолёта
- Воздушный винт вертолёта
- 1.Принцип создания подъёмной силы лопастями
- 2.Конструкция лопастей
- 3.Схемы крепления лопастей
- 4.Способы уравновешивания реактивного момента
- Классификации вертолётов
- Перспективы развития вертолётов и мультикоптеов
- Сравнение систем стабилизации полёта
- Разработка проекта мультикоптера
- Заключение
- Вывод
- Источники информации
Цель: исследовать историю развития вертолётов и несущих винтов.
Задачи:
- Изучить историю развития вертолётов
- Рассмотреть системы управления вертолётом
- Изучить несущий винт вертолёта
- Рассмотреть классификации вертолётов
- Выявить направления развитие будущего вертолётов
- Разработать проект собственного мультикоптера
- Установить требования перед разработкой мультикоптера
Гипотеза: если создать систему управления вертолёта с помощью несущего винта, то вертолёты будут более стабильными и манёвренными в полёте.
Актуальность: вертолёты - уникальные машины. Они могут зависать на месте, лететь с большой скоростью, в случае чрезвычайного положения могут осуществить посадку в режиме авторотации, перевозить многие тонны полезной нагрузки, при этом это один из самых манёвренных типов воздушного транспорта. Это осуществляется за счёт их конструкции, если самолёту для создания подъёмной силы, нужно лететь вперёд, то вертолёту нужно вращать винт при этом сам вертолёт может оставаться на месте или лететь в любую из сторон.
Также на основе вертолётов создаются мультикоптеры что в настоящее время очень перспективное направление.
Введение
Винт – святой винт, должен в будущем вознести человека в воздух [1].
Феликс Турнашон «Манифест динамического воздухоплавания», 1863 г.
Обоснование темы: Данная тема выбрана потому, что они совмещают в себя большую скорость передвижения и возможность зависать на месте. Таким образом вертолёты — это отдельный класс техники, который будет всегда востребован.
Вертолёт — винтокрылый летательный аппарат, у которого подъёмная и движущая силы на всех этапах полёта создаются одним или несколькими несущими винтами с приводом от одного или нескольких двигателей. Одним из наиболее ответственных агрегатов вертолета является несущий винт (Рис. 1) - несущий винт выполняет у вертолета те же функции, что и крылья у самолета, создавая необходимую для полета подъемную силу. Кроме того, благодаря специальным устройствам он служит для управления вертолетом [2].
 (Рис. 1) Несущий винт вертолета Ми-8 (Рис. 1) Несущий винт вертолета Ми-8
Основная часть
История развития вертолётов
Рассмотрим историю зарождения вертолётов в России и в мире.
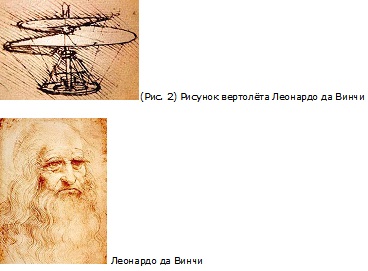
Первое упоминание о вертикально взлетающем летательном аппарате было в Китае около 400 г.н.э., представлял собой игрушку в виде палки с прикреплёнными к концу перьями в виде винта, которую следовало раскручивать в зажатых ладонях, а затем отпускать. Следующее упоминание о попытке создания вертолётов было в 1475 году у Леонардо да Винчи. По замыслу его аппарат (Рис. 2) должен был «ввинчиваться» в воздух, а в движение приводить мускульная сила человека [3].
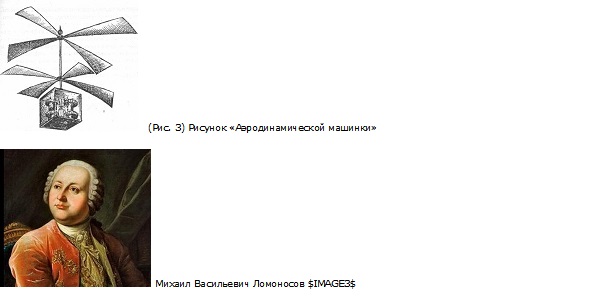
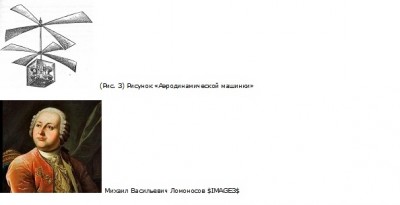
Позже в 1754 году наш соотечественник Михаил Васильевич Ломоносов создал первый прототип вертолёта (Рис. 3). Основой несущего винта были спаренные воздушные винты - это первая реализация соосной схемы. Создавался данные прототип вертолёта для исследования параметров атмосферы на различных высотах. Ломоносов назвал свое устройство «Аэродинамическая машинка». Продемонстрировал возможность устройства летать на заседании Российской академии наук [4].
Следующее упоминание о работах над вертолетом относится к ХIХ веку, когда французы ‚ Лонуа и Бьенвеню построили модель вертолета в 1875 году. Появилось большое число различных проектов, стоит упомянуть такие имена, как Кэйли, д'Амекур, Пено, Форланини [5]. В 1905 году француз М. Леже создал вертолет с двумя противоположно вращающимися винтами, приводимыми в движение электродвигателем. Этот аппарат мог на некоторое время отрываться от земли [6]. Итак, 1907 год 29 сентября, братья Луи и Жаком Бреге построили вертолёт, состоящий из четырёх винтов. Каждый винт состоял из 8 лопастей в два этажа по 4 лопасти. Зафиксировано что он поднялся на 50 см, хотя, полёт был не управляемым, но - это первый успешный проект с ЛА с несущими винтами.
 Луи Чарльз Бреге Луи Чарльз Бреге
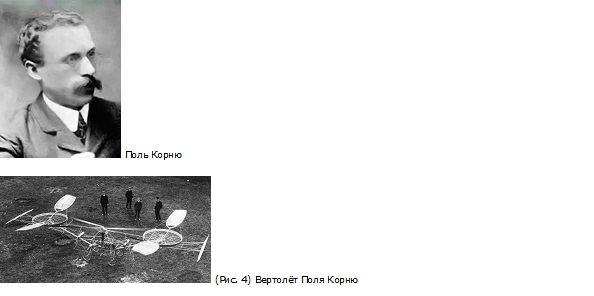
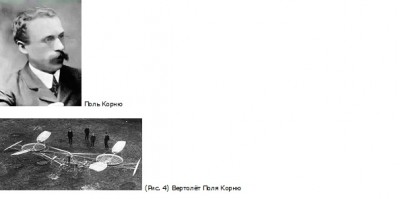
В этом же году (1907) 13 ноября поднялся в воздух первый человек это был французский механик велосипедов Поль Корню. Главная идея - сделать вертолёт управляемым, Поль Корню установил отклоняющиеся поверхности и за счёт них мог частично управлять вертолётом (Рис. 4).
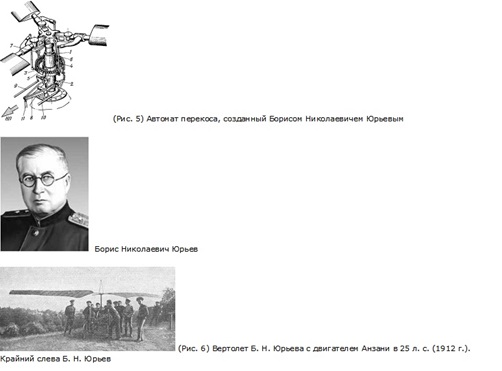
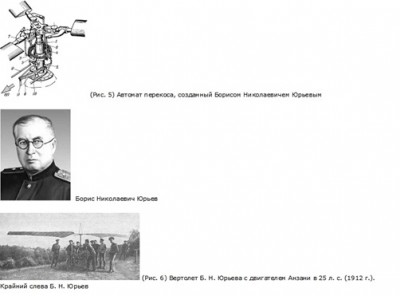
18 мая 1911 года выдающийся инженер Б. Н. Юрьев изобрёл автомат перекоса (Рис. 5). До изобретения планировалось управлять вертолётом через отклоняемые поверхности или дополнительными воздушными винтами. В 1912г. вертолет Б.Н. Юрьева принял участие во второй международной выставке воздухоплавательных аппаратов (Рис. 6) и награжден золотой медалью. Схема вертолета, использованная при постройке, вошла в историю вертолетостроения как одновинтовая с рулевым винтом. Наиболее распространенная в мире.
И в настоящее время в вертолётах используется автомат перекоса.
Отечественное вертолётостроение
Под руководством профессора Б. Н. Юрьева в ЦАГИ были начаты исследования различных режимов винта вертолета, по выбору его наивыгоднейших параметров. В конце 1926 г. была создана в ЦАГИ специальная геликоптерная группа. Было проведено эскизное проектирование нескольких типов вертолетов, и наиболее удачные из них стали предметом конструктивной разработки. Были проведены опыты с натурным несущим винтом вертолета диаметром 6 м на специально построенном стенде. Стендовые исследования давали возможность определить тягу и потребную мощность, получить картину работы автомата перекоса, данные по передачам, запуску и др. Уточнялась теория и разрабатывались методы практических расчетов [7].
Ниже в таблице 1 приведено описание первых советских вертолетов.
Таблица 1. Первые советские вертолеты
|
Название
|
Описание
|
|
ЦАГИ 1-ЭА
|
В ЦАГИ в конце 1928 г. было начато рабочее проектирование одного из обследованных вариантов - вертолёта одновинтовой схемы. Проектирование этого первого советского экспериментального вертолёта, известного под маркой ЦАГИ 1-ЭА, оказалось возможным в результате обширных экспериментальных исследований работы несущего винта на специфических вертолётных режимах и испытаний несущего винта диаметром 6 м на натурном стенде. Вертолёт ЦАГИ 1-ЭА был построен по одновинтовой схеме, предложенной ещё в 1909 - 1912 гг. Б. Н. Юрьевым. В процессе летных испытаний был выяснен основной недостаток, присущий схеме с жестким креплением винта, — недостаточная устойчивость машины. Только при наличии хорошей системы управления и в значительной мере благодаря искусству А. М. Черемухина можно было систематически и регулярно проводить полеты на вертолете 1-ЭА [7].
|
|
ЦАГИ 3-ЭА
|
Это был второй вертолет — модифицированный экземпляр 1-ЭА, построенный в 1933 г. Он имел некоторые конструктивные особенности, почему и получил самостоятельное обозначение. Аппарат прошел наземные испытания с подъемом на привязи, но в полете не испытывался. Он послужил основой для нового вертолета ЦАГИ 5-ЭА [7].
|
|
ЦАГИ 5-ЭА
|
Был закончен постройкой в 1933 г. Конструкция его мало отличалась от предыдущих, но несущий винт и управление были принципиально новыми. Несущий винт, предложенный И. П. Братухиным, представлял собой комбинацию двух трехлопастных винтов диаметрами 12 и 7,8 м. Три большие лопасти образовывали несущий винт, а три малые лопасти, закрепленные на втулке между большими лопастями, составляли управляющий винт. За 1933—1935 гг. на вертолете было выполнено много исследовательских полетов главным образом с целью изучения поведения несущего винта, что позволило спроектировать новый, более мощный аппарат [7].
|
|
ЦАГИ 11-ЭА
|
Был построен по схеме И. П. Братухина в 1936 г. и имел значительно большие размеры и массу, чем предыдущие аппараты. Особенность его заключалась во взаимной связи несущего и рулевого винтов, левый из которых должен был иметь на режиме висения обратную тягу, и вообще на всех режимах должно было быть обеспечено полное соответствие и взаимодействие всех трех винтов путем изменения их шага. В 1940—1941 гг. велись систематические исследования этого аппарата в полете. Испытания проводил в качестве летчика инженер Д. И. Савельев, руководил испытаниями В. П. Лаписов. Вертолет показал хорошую устойчивость и удовлетворительную управляемость [7].
|
Во время второй мировой воины работы над вертолетами проводились только в Советском Союзе (Братухин, Камов, Миль) и Соединенных Штатах (Пясецкий, Сикорский). В Советском Союзе конкурентом Игорю Сикорскому стал выдающийся конструктор Михаил Леонтьевич Миль, занимавшийся в основном созданием вертолетов большой грузоподъемности. К началу XXI столетия было построено свыше 30 ООО вертолетов марки «Ми», многие из этих неприхотливых машин до сих пор эксплуатируются в различных странах мира.
Данная мечта человечества,
выраженная в сказке о ковре-самолёте,
наиболее полно воплощается в вертолёте
М. Л. Миль
 Михаил Леонтьевич Миль Михаил Леонтьевич Миль
Вторым советским конструктором вертолетов стал Николай Ильич Камов. Благодаря энтузиазму Н.И. Камова в Советском Союзе получили широкое распространение вертолеты соосной схемы. Именно этому человеку мы обязаны появлению слова «вертолет» вместо иностранного «геликоптер».
 Николай Ильич Камов Николай Ильич Камов
Система управления вертолёта
Основными частями управления вертолёта являются автомат перекоса и втулка.
Автомат перекоса - это механизм обеспечивает управление вертолёта во всех направлениях (при изменении положения ручки управления). Это достигается тем, что автомат периодически изменяет угол установки каждой лопасти винта. В путевом канале вертолета одновинтовой схемы направляются с помощью рулевого винта (изменение положения педалей).
Такое изменение углов установки лопастей называется циклическим шагом, так как в течение каждого оборота винта угол установки каждой из лопастей изменяется циклически. Если же происходит перемещение всего автомата перекоса вместе с шаровым шарниром и муфтой на валу вверх или вниз, то изменяется общий шаг лопастей. Втулка служит для крепления лопастей, обеспечивающего им необходимые степени свободы, а также для передачи крутящего момента с вала на винт. Конструкция втулки определяется прежде всего типом винта. Втулки шарнирных винтов можно разделить на две группы [8]:
- Отнесенными и разнесенными горизонтальными шарнирами;
- Совмещенными горизонтальными шарнирами.
У вертолета есть три главных агрегата: двигатель, автомат перекоса и рулевой винт. Для этого существуют три системы: система управления автоматом перекоса (управление циклическим шагом несущего винта), система управления хвостовым винтом и система управления общим шагом винта во взаимодействии с управлением мощностью двигателя, или система «шаг-газ».
Воздушный винт вертолёта
Принцип создания подъёмной силы лопастями
Как крыло самолета, так и лопасть винта имеют определенный аэродинамический профиль (Рис. 7), обеспечивающий создание подъемной силы.
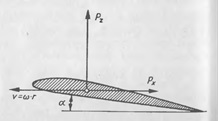 (Рис. 7) Образование подъёмной силы в сечении лопасти (Рис. 7) Образование подъёмной силы в сечении лопасти
Вращающиеся лопасти также создают подъемную силу, зависящую от скорости и угла атаки. Но если на крыло набегает поток с постоянной по размаху скоростью, то в случае лопасти скорость набегающего потока значительно изменяется по размаху. В несколько упрощенном виде это показано на (Рис. 8); винт вращается вокруг своей оси с некоторой угловой скоростью, а линейная скорость V может быть найдена по известной формуле механики: формула: [9]
V= w * r
Где, V – линейная скорость рассматриваемой точки лопасти, м\с, w - угловая скорость винта, 1\с, r - радиус на котором находится рассматриваемая точка.
w = п * n \ 30
Где п =3.14, n – число оборотов винта, об\мин.
Суммарная подъёмная сила всех лопастей называется силой тяги винта.
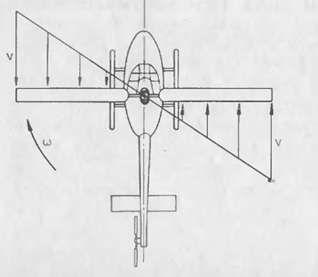 (Рис. 8) Распределение скорости набегающего потока по крылу самолёта и по крылу вертолёта (Рис. 8) Распределение скорости набегающего потока по крылу самолёта и по крылу вертолёта
Конструкция лопастей
Лопасти несущих винтов могут быть: смешанной, цельнодеревянной, цельнометаллической конструкции, пластмассовые и из композиционных материалов.
Смешанная конструкция имеет стальной лонжерон, деревянные нервюры и стрингеры и полотняную или фанерную обшивку.
Цельнодеревянная конструкция изготавливается из склеенных между собой продольных планок, покрыт фанерой и обтянут авиационным полотном, недостатком, в конструкции которых используется древесина и полотно, является подверженность воздействию влаги, ослаблению прочности, нарушению балансировки.
Металлическая конструкция по сравнению с деревянной и смешанной конструкциями имеют значительные эксплуатационные преимущества. Они в меньшей степени подвержены воздействию атмосферных факторов, требуют менее строгого режима хранения и более долговечны.
Основным силовым элементом лопасти (Рис. 9) является дюралюминиевый лонжерон, к которому приклеены хвостовые секции. Каждая секция представляет собой набор нервюр, приклеенных к тонкой обшивке.
В настоящее время для изготовления лопастей широкое применение нашли пластические материалы и композиционные материалы. Силовым элементом пластмассовой лопасти является полый носок-лонжерон, представляющий собой прессованный профиль. Задняя часть — хвостовик выполняется в форме обтекателя с тонкой обшивкой. Внутренний объем хвостовой части заполняется пористым пластиком.
Производство не такое простое. Отличается дороговизной, длительностью производства и проблемой утилизации.
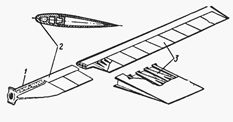 (Рис. 9) Лопасть металлической конструкции: 1 – гребенчатый узел крепления лопастей, 2 – лонжерон, 3 – секции (Рис. 9) Лопасть металлической конструкции: 1 – гребенчатый узел крепления лопастей, 2 – лонжерон, 3 – секции
Схемы крепления лопастей
Шарнирное соединение
При шарнирном соединении, изобретённом Хуаном де Ла Сьерва, лопасти крепятся к корпусу втулки последовательно через осевые, вертикальные и горизонтальные шарниры. Благодаря шарнирному сочленению лопастей с корпусом втулки значительно снижаются переменные напряжения в элементах несущего винта и уменьшаются передающиеся от винта на фюзеляж вертолёта моменты аэродинамических сил.
Во время полёта на вертолётах с шарнирным соединением можно увидеть, что лопасти в воздухе описывают не круг, а фигуру в виде воронки или конуса [10].
Упругое соединение
Роль вертикального и горизонтального шарнира при таком соединении играет упругий элемент, изготовленный из композитных материалов, или торсион. На несущем винте с таким соединением может быть значительно повышена эффективность управления по сравнению с шарнирным, что способствует увеличению манёвренности вертолёта, к тому же уменьшается явление «земного резонанса» [10].
Полужёсткое соединение
При такой схеме две лопасти винта жёстко крепятся к центральной втулке по типу качелей (коромысла): когда одна лопасть совершает маховое движение вверх, другая совершает симметричное движение вниз. Важным преимуществом такой схемы является её простота, облегчающая и удешевляющая изготовление винта и обслуживание его в эксплуатации [10].
Жёсткое соединение
Лопасти винта жёстко крепятся к втулке, установленной на приводном валу, с использованием только осевого шарнира. Такая схема является самой простой, но в то же время наиболее подверженной разрушительным вибрациям. К тому же такая схема обладает повышенной массой по сравнению с шарнирным соединением. [10].
Способы уравновешивания реактивного момента
Вращающийся несущий винт стремится раскрутить фюзеляж вертолёта в обратном направлении (создаётся реактивный момент).
Рулевой винт
Для устранения данного явления и предназначен установленный вертикально на хвостовой балке рулевой винт. Изменяя шаг винта происходит управление по рысканью. Управление шагом винта осуществляется педалями в кабине лётчика.
Соосная схема винтов
При таком расположении винтов, винты вращаются в разные стороны и уравновешивают реактивные моменты друг друга.
Фенестрон
Это - закрытый рулевой винт вертолёта, устанавливаемый в специальный профилированный канал, встроенный в киль вертолета.
NOTAR
NOTAR — система управления вертолётом по рысканью. Состоит из вентилятора, установленного в хвостовой части фюзеляжа, и системы воздушных сопел на хвостовой балке. Сопла в корневой части балки воздействуют на пограничный слой, вследствие чего возникает эффект Коанда — поток воздуха от несущего винта изменяет своё направление, отклоняясь в сторону. Этим компенсируется реактивный момент.
Классификация вертолётов.
Вертолёты классифицируются по расположению и строению несущего винта:
Вертолёт, имеющий один несущий винт (Рис. 10) [11].
 (Рис. 10) Вертолёт с одним несущим винтом, Ми-8 (Рис. 10) Вертолёт с одним несущим винтом, Ми-8
- Двухвинтовая продольная схема
Вертолёт, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных на продольной оси вертолёта (Рис. 11). Для этого несущие винты устанавливаются в носовой и хвостовой частях вертолёта [11].
 (Рис. 11) Вертолёт продольной схемы ЯК-24 (Рис. 11) Вертолёт продольной схемы ЯК-24
- Двухвинтовая поперечная схема
Вертолёт, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных на поперечной оси вертолёта (Рис. 12). Для этого несущие винты устанавливаются на концах крыла или фермы [11].
 (Рис. 12) Вертолёт поперечной схемы Ми-12 (Рис. 12) Вертолёт поперечной схемы Ми-12
- Двухвинтовая соосная схема
Вертолёт, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных на одной оси один над другим (Рис. 13). Часто такие несущие винты считают единой конструкцией и называют соосным несущим винтом [11].
 (Рис. 13) Вертолёт соосной схемы, Ка-52 (Рис. 13) Вертолёт соосной схемы, Ка-52
- Двухвинтовая поперечная схема с большим перекрытием винтов (синхроптер)
Вертолёт, имеющий два несущих винта, вращающихся в противоположных направлениях и расположенных со значительным перекрытием с небольшим наклоном осей вращения (Рис. 14) [11].
 (Рис. 14) Вертолёт с перекрещивающимися лопастями, K-Max (Рис. 14) Вертолёт с перекрещивающимися лопастями, K-Max
Перспективы развития вертолётов и мультикоптеров.
Будущее развитие вертолётов пойдёт по двум основным направлениям:
- Повышение скорости вертолётов
В настоящее время представлено несколько проектов вертолётов с дополнительными винтами для достижения большей скорости.
Один из проектов разработан командой аспирантов Технологического института Джорджии создала концепт вертолета (Рис. 15). Концепт в состоянии совершать взлет и посадку «по-вертолетному», но при этом он может летать со скоростью, в 3 раза превышающей скорость любого современного вертолета [12].
 (Рис. 15) Разработка аспирантов Технологического института Джорджии (Рис. 15) Разработка аспирантов Технологического института Джорджии
Также существует проект вертолёта, разработанный американской компании Sikorsky Aircraft.
Sikorsky S-97 Raider (Рис. 16) — построенный по соосной схеме с толкающим винтом в хвостовой части. Первый полёт S-97 состоялся 22 мая 2015 года в штате Флорида, США. Максимальная скорость до 407 километров в час [12].
 (Рис. 16) Sikorsky S-97 Raider на выставке. (Рис. 16) Sikorsky S-97 Raider на выставке.
Российской разработкой перспективных вертолётов занимается ОКБ имени Камова.
Впервые концепт-модель этого вертолета (Рис. 17) была представлена во время международной выставке «HeliRussia -2008», которая состоялась в МВЦ «Крокус Экспо».
Это совершенно новая техническая схема. Вертолет поднимается с земли с помощью жестких и укороченных винтов. Набирает скорость 400 км/ч, потом включается турбореактивный двухконтурный двигатель, разгоняющий машину до 700-800 км/ч. Затем винты автоматически складываются в футляр на "спине" геликоптера. Когда надо приземлиться, винты снова раскладываются, реактивный двигатель выключается, и машина приземляется в обычном режиме [13].
 (Рис. 17) Модель вертолёта К-90 (Рис. 17) Модель вертолёта К-90
- Развитие мультикоптеров.
Историческая справка: Мультикоптер (многороторный вертолёт) — это летательный аппарат с произвольным количеством несущих винтов, вращающихся диагонально в противоположных направлениях.
Многовинтовые вертолёты разрабатывались ещё в первые годы вертолётостроения. Один из первых мультикоптеров, который реально оторвался от земли и мог держаться в воздухе, был создан Георгием Ботезатом и испытан в 1922 году. Новое рождение мультикоптеры получили в XXI веке, уже как беспилотные аппараты. Благодаря простоте конструкции мультикоптеры часто используются в любительском моделировании.
На CES 2016 был продемонстрирован очень интересный мультикоптер Ehang 184.
Аппарат представляет собой мультикоптер с закрытой кабиной, в которой может разместиться один человек (Рис. 18). Вместо обилия неизвестных обывателю тумблеров и механизмов в единственном отсеке Ehang 184 нашлось место пассажирскому креслу и планшету. Последний служит для того, чтобы, заняв место в воздушном такси, вы могли указать пункт назначения, а затем наслаждаться видами на землю [14].
 (Рис. 18) Пассажирский мультикоптер Ehang 184 на выставке CES 2016 (Рис. 18) Пассажирский мультикоптер Ehang 184 на выставке CES 2016
Что касается технических характеристик Ehang 184, то мультикоптер массой 200 кг и длиной 5,5 м, работающий полностью на электрической тяге, способен переместить единственного пассажира на расстояние до 16 км или же пребывать в полёте не более 23 минут. Максимальная скорость перемещения беспилотника с пассажиром внутри составляет 100 км/ч, а предельная высота, на которую он способен подняться, ограничена 3,5 км [14].
Официальное видео о Ehang 184:
Немецкая компания e-volo совершила тестовый пилотируемый полет пассажирского мультикоптера Volocopter VC200.
Полет состоялся 30 марта 2016 года на аэродроме в Южной Германии, управлял пассажирским дроном директор компании Александр Цозел.
В рамках полета мультикоптер поднялся на высоту 20-25 метров и передвигался со скоростью, не превышабщей 25 километров в час. Максимальная взлетная масса летательного аппарата составляет 450 килограммов, максимальная высота — два километра. По словам создателей, управление летательным аппаратом принципиально не отличается от управления игрушечными беспилотниками.
На данный момент Volocopter VC200 — первый совершивший пилотируемый полет «полноценный» пассажирский мультикоптер с перспективами серийного производства [15].
Видео первого полёта:
Сравнение систем стабилизации полёта
В данное время существует несколько способов стабилизации полёта вертолётов и мультикоптеров.
Сравним две наиболее распространённые системы стабилизации: флайбар и цифровая стабилизация (использование микроконтроллеров, цифровых гироскопов и акселераторов).
Таблица 2 Сравнений.
|
Критерий
|
Флайбар
|
Цифровая стабилизация
|
|
Возможность тонкой настройки
|
Нет
|
Имеется
|
|
Скорость реакции
|
Ниже
|
Выше
|
|
Реализация «3D» полёта (полёт в перевернутом состоянии)
|
Нет
|
Имеется
|
|
Скорость полёта
|
Ниже
|
Выше
|
|
Плавность полёта
|
Выше
|
Ниже
|
|
Вес
|
Ниже
|
Выше
|
|
Простота конструкции
|
Проще
|
Сложнее
|
|
Стоимость
|
Ниже
|
Выше
|
Стабилизация с использованием микроконтроллеров более современный вариант, используется в больших вертолётах что обеспечивает большую стабильность полёта.
Из таблицы подвожу итог, что флайбар легче, дешевле и лёгок в конструкци, и что делает его распространённым в дешёвых вертолетах.
Видео работы флайбара:
Я продемонстрировал работу флайбара, на видео хорошо видно, что при наклоне флайбар остаётся в прежнем положении от оси вращения и так как он соединён с лопастями несущего винта и может изменять их шаг, он пытается вернуть ось вращения в прежнее положение за счёт чего и достигается плавный и стабильный полёт.
Разработка проекта мультикоптера
Ввиду большой актуальности данной темы решил разработать собственный мультикоптер, и установил перед собой несколько требований:
- Обеспечить высокую стабильность полёта
- Достигнуть высокую скорость полёта
- Создать конструкцию мультикоптера прочной и простой
- Оснастить к мультикоптер датчиками позиционирования
- Установить систему FPV (потоковая передача видео)
Заключение
- Вертолёты прожили долгий путь с первых нестабильных винтокрылых машин до современных вертолётов, и сейчас является одним из самых перспективных направлений развития.
- Но всё это невозможно без развития несущего винта. Например, изобретение автомата перекоса, который оказался настолько гениальной идеей что она используется в самых современных вертолётах.
- В XXI веке стало очень актуальны мультикоптеры. Как правило их чаще всего используют в любительских ЛА. Такие небольшие дроны способны выполнять множество задач.
- Мультикоптеры создавались с помощью опыта разработки вертолётов. Множество расчётов взяты с вертолётной техники. Существуют мультикоптеры с вертолётной системой управления.
- В своей работе показал роль конструкции винта и способов управления ЛА в развития вертолётов, и наглядно демонстрируется возможности дальнейшего развития вертолётов.
Вывод
- Проводя обзор на литературу по истории вертолётов установил, что первые прототипы вертолётной техники зародились очень давно, и занимала головы многих изобретателей. Так со временем появились вертолёты самых разных конструкций.
- Только после изобретения автомата перекоса Б. Н. Юрьевым стало возможно полноценное строительство стабильных и управляемых вертолётов.
- В результате исследовательской работы проведен анализ и сравнение двух систем стабилизации и показано наглядная работа автомата перекоса.
- В России вертолёты всегда пользовались приоритетом, и поэтому у нас созданы лучшие вертолёты.
- Уверен, в будущем вертолёты будут также сильно востребованы так как они выполняют задачи, которые не могут выполнить не самолёты не дирижабли. Развитие вертолётов пойдёт по двум направлениям: первое, у военных и специальных вертолётов будет повышаться скорость полёта. Второе, развитие мультироторных ЛА, для гражданских целей, так как они дешевле, более экологичнее, менее шумны, более безопасней, и просты в управлении.
Источники информации
- Вертолёты зовутся МИ. Рассказ о генеральном конструкторе [книга] : Изд. 2-е, доп. – «Моск. Рабочий», 1976 г. – Москва : Д. Гай, 1976 г. – 160 с, 31с.
- «Большая Российская энциклопедия», 1994, 130 с.
- Летающие модели вертолётов. [книга]: – Москва «Мир» 1988, – 136 с., 7 с.
- «Большая Российская энциклопедия», 1994, 132 с.
- Летающие модели вертолётов, 7 с.
- Летающие модели вертолётов, 8 с.
- Развитие авиационной науки и техники в СССР. Историко-технические очерки [книга] : «Наука» Моска 1980 – 496 с., 107 с.
- Летающие модели вертолётов, 16 с.
- Летающие модели вертолётов, 25 с.
- Летающие модели вертолётов, 19 с.
- «Большая Российская энциклопедия», 1994, 131 с.
- Вертолётная индустрия. Журнал о вертолётах. Май 2016. Москва. Издание АВИ \ гл. ред. Ирина Иванова, 88 с. – Режим доступа: www.helicopter.su, 48 с.
- Максим Чижов, Ка-90 [Электронный ресурс] // InFuture.ru / гл. ред. Татьяна Есенина. – 2011. – Режим доступа: infuture.ru
- Дмитрий Приходько, CES 2016 [Электронный ресурс] // 3dnews.ru / гл. ред. Денис Нивников. – Москва 2016. – Режим доступа: 3dnews.ru
- Kathrin Mohr, Volocopter [Электронный ресурс] // volocopter.com. – Режим доступа: press.volocopter.com
|